About
Highly skilled Robotics and Virtual Reality Engineer with 10 years of experience in developing cutting-edge technologies. Expertise in designing, building, and programming complex robotic systems, as well as developing immersive virtual reality environments. Proficient in multiple programming languages including C++, C#, VB, and Java. Seeking a challenging role in an innovative organization where I can apply my skills and contribute to the advancement of technology.

Robotics & VR/XR Engineer.
Detail-oriented and results-driven Robotics & VR/XR Engineer with a track record of success in developing complex systems and solutions.
- Phone: +358 41 7422316
- City: Oulu, Finland
- Email: adhi.cwidagdo@gmail.com
Both my BSc and MSc studies focused on particular aspects of robotics and wearable device. Additionally, I participated in several international and national robotics competitions, achieving several award nominations. Further, I was a member of several international collaborative engineering projects. Apart from my expertise as a roboticist, I have experience in graphics design, arts, front-end web development, and multimedia.
Skills
My skill list below shows the most relevant skill related to the current need, and my other skills are available in my CV.
Resume
Summary
Adhi Widagdo
An innovative project engineer who has expertise in designing and programming robotic systems, as well as developing immersive virtual reality experiences.
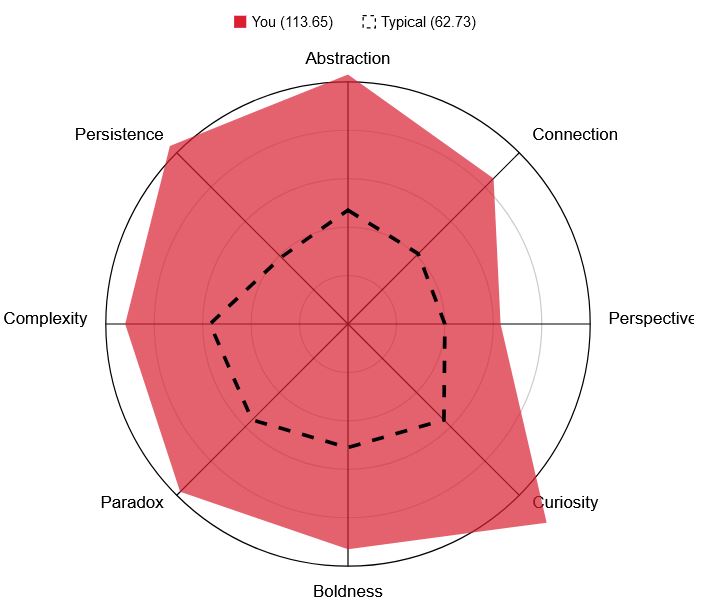
- My first try creativity test score
Education
Master of Science in Electrical Engineering
2014 - 2016
National Taiwan University of Science & Technology, Taipei, Taiwan
GPA 3.97 on a scale of 4.0
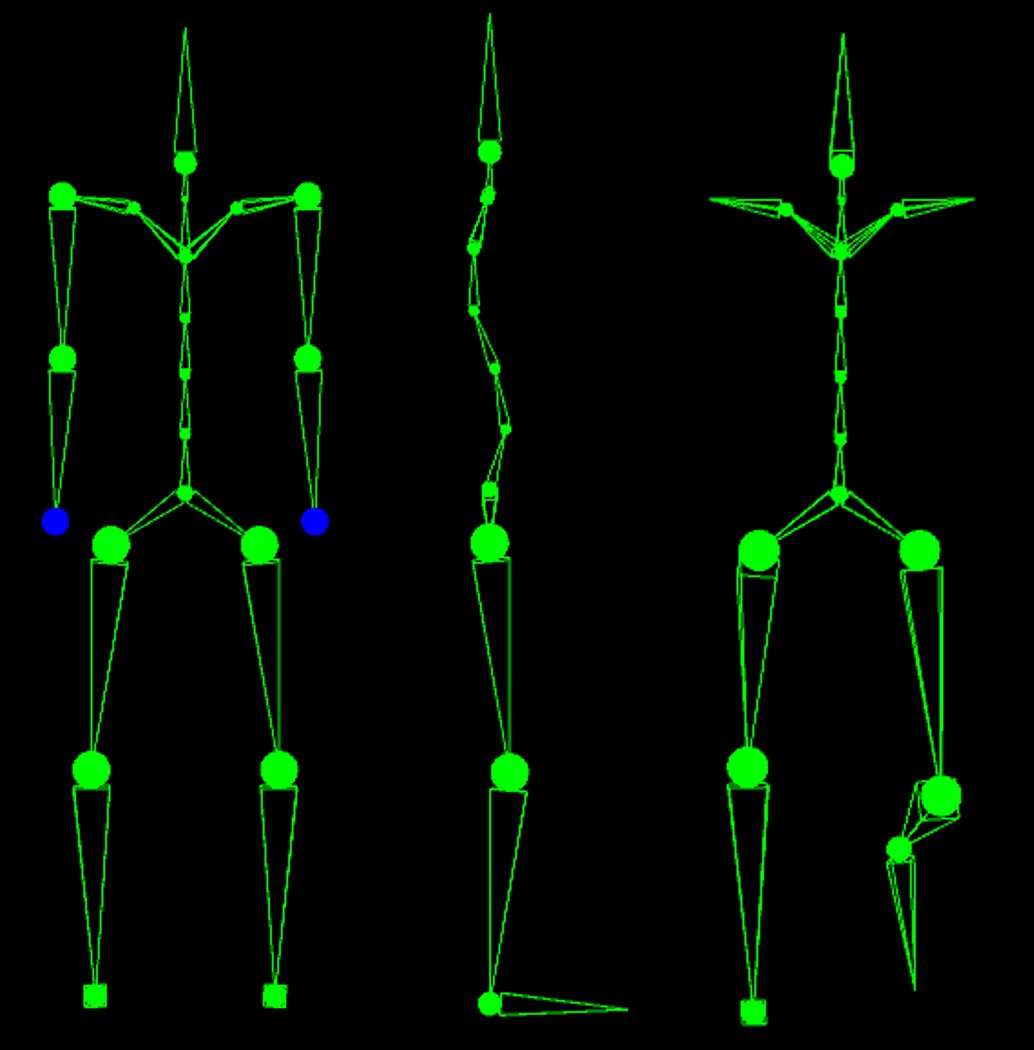
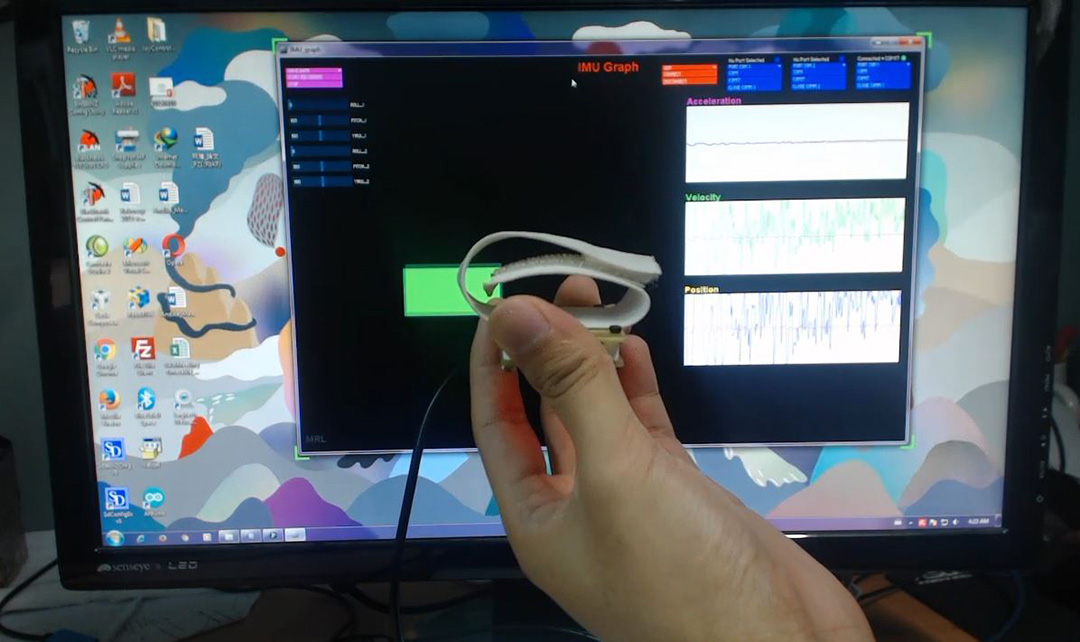
Master Thesis: "Wearable Motion Tracking System using Quaternion-based Complementary Filter Algorithm with Inertial Measurement Units".
Bachelor of Applied Science in Mechatronics Engineering
2009 - 2013
Sepuluh Nopember Institute of Technology, Surabaya, Indonesia
GPA 3.50 on a scale of 4.0
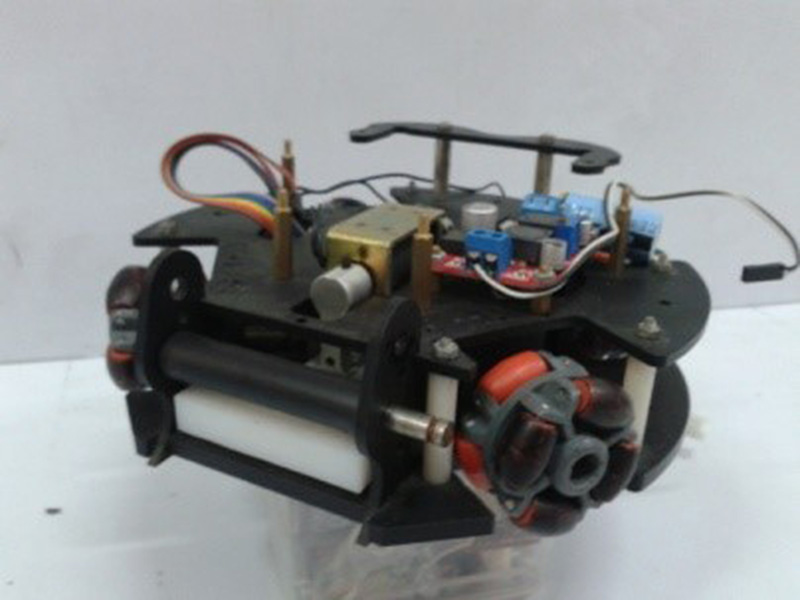
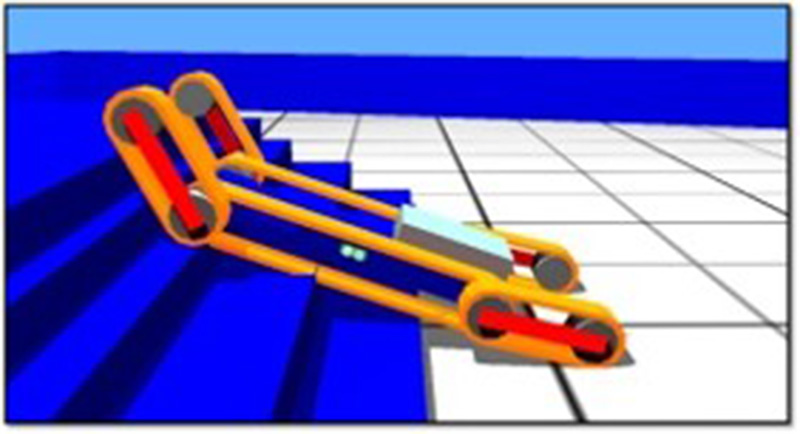
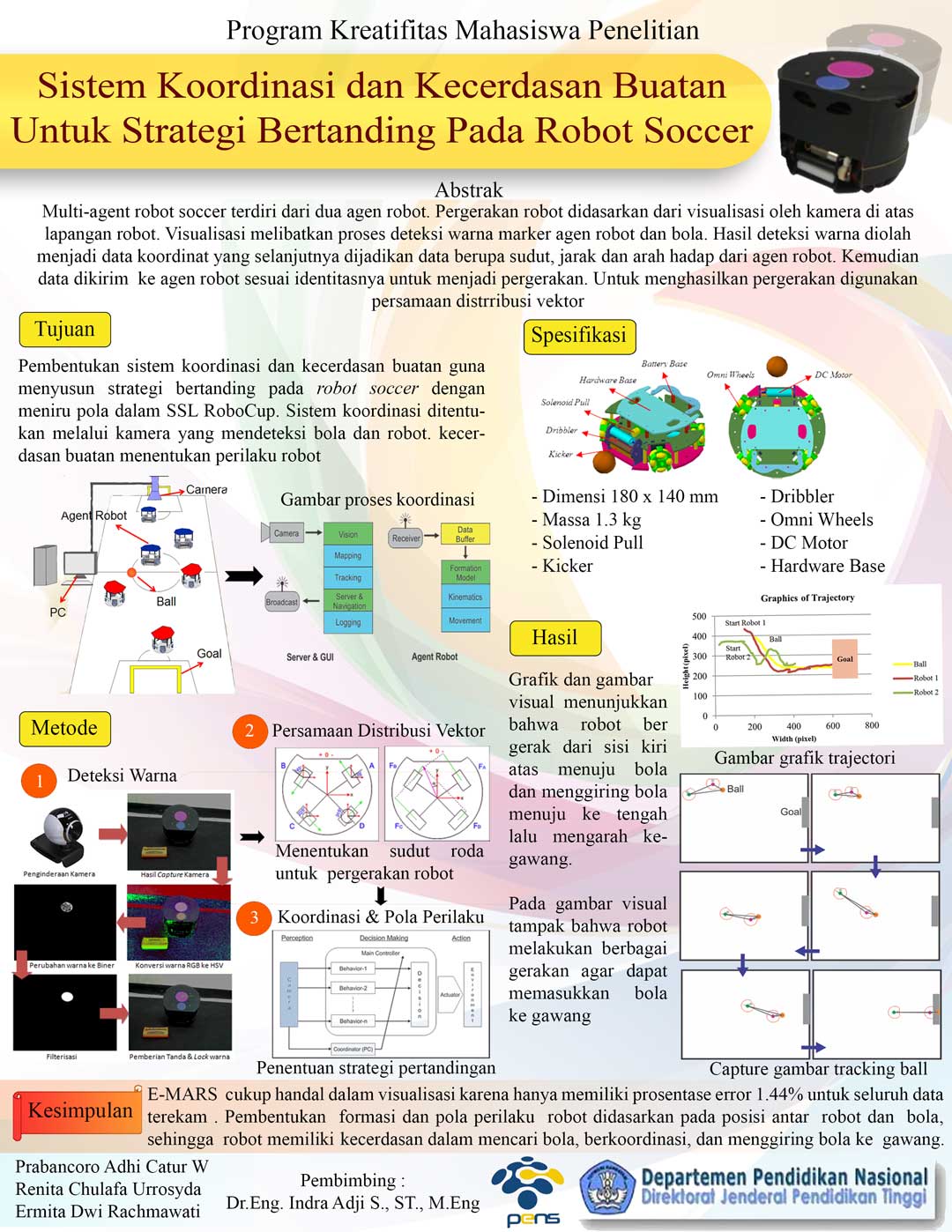
Bachelor Thesis: "Design and Construction of Multi-agent Robot Soccer: Localization and Synchronization of Multi-agent Robot Soccer based on Visualization".
Professional Experience
Researcher
2019 - Present
Research Center for Ubiquitous Computing, University of Oulu
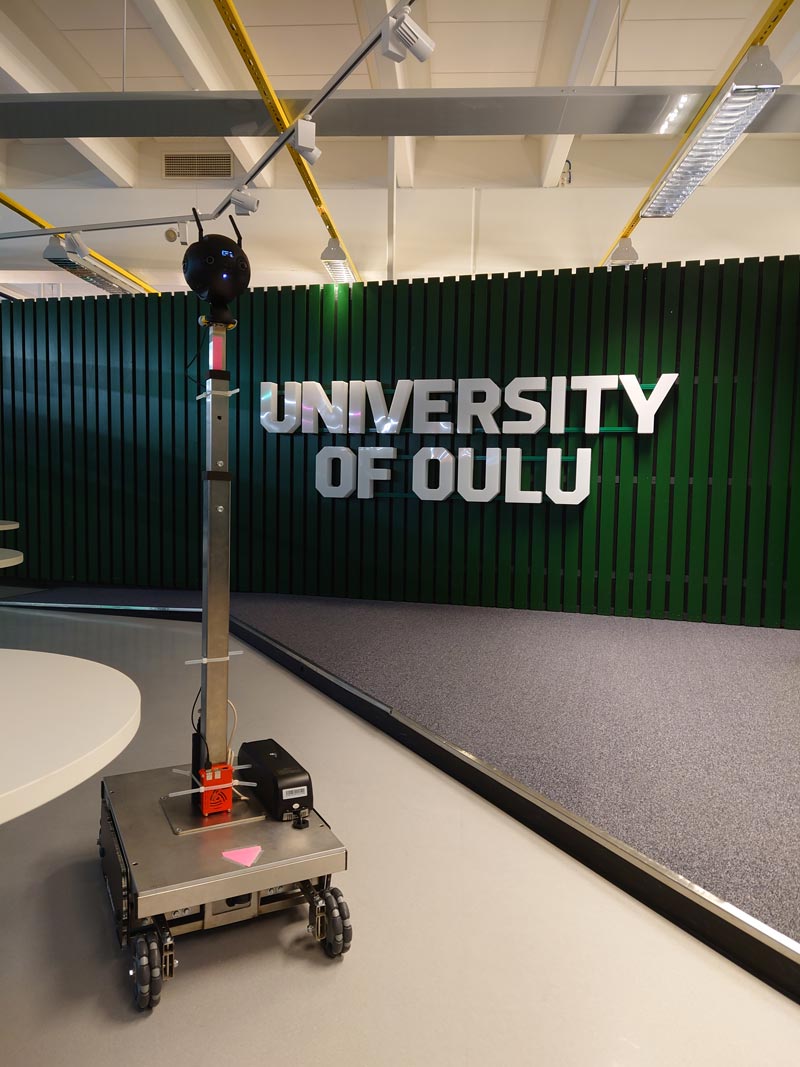
- Research towards a VR-based robotic telepresence.
- Conducting VR study toward human subject experiment.
- Data analyst of users' experiences on VR study.
- Teaching assistant on fundamentals of sensing, tracking, and autonomy courses.
- Community, Social, and Research unit service, including giving demos and talking to the visitors, participating in the unit events as well an events organizer.
Software engineer of XR cinema technology
2019 - 2021
Research Center for Ubiquitous Computing, University of Oulu
- Create source codes of the seamless and artifacts-free mesh generator for rendering high-fidelity images.
- Integrate vertices, uv-texture, normal map, shaders, equirectangular mapping, cross-cube-map, fb-cube-map, and interpolation.
- Successfully render 360-degree images with 16K resolution and 8K resolution videos.
XR Cinema Technology Developer
2021 - 2023
Research Center for Ubiquitous Computing, University of Oulu
- Integrate XR cinema with various HMDs, including Oculus Rift S, Oculus Quest 2, Varjo XR1, XR3, and Varjo Aero.
- Integrate with the video playback of robotics telepresence projects and immersive telemeeting projects, including gaze tracking, the video see thru, and live streaming with VR HMD.
- Continuously researched and evaluated new technologies and techniques for improving the performance of the XR cinema technology.
Project Engineer on XR Cinema Perception Projects
2022 - 2023
Research Center for Ubiquitous Computing, University of Oulu
- Conduct software tweaking on XR cinema technology to induce several senses.
- Produce and integrate high-quality videos for the immersive telepresence system.
- Implement gaze tracking and events system.
- Conduct a VR study and analyze users' experiences.
Videographer of panoramic 360-degree camera projects
2019 - 2022
Research Center for Ubiquitous Computing, University of Oulu
- Hand on various 360-degree cameras for videography projects.
- Produce images and video stories of telepresence, including robotic telepresence and immersive telepresence meeting.
- Successfully provide seamless and artifacts-free images and videos with high resolution.
Technical support and operator of 3D scanner projects
2019 - 2022
Research Center for Ubiquitous Computing, University of Oulu
- Assist in the development of photogrammetry-based 3D Scanner.
- Collaborate with project teams to plan and execute 3D scanning projetcs and data collection.
- Operate and maintain 3D scanning equipment and ensuring optimal performance.
- Process and analyze 3D scan data using industry-leading softwares.
- Successfully completed multiple 3D scanning projects, including human avatars and animals used for VR zoology museum, library, and 3D printed gifts.
Technical Support on Optofidelity Robot for Benchmarking VR Headsets
2019 - 2020
Research Center for Ubiquitous Computing, University of Oulu
- Worked closely with engineers from Optofidelity company to evaluate the software and test procedures for benchmarking VR headsets.
- Conducted testing and evaluation of VR headsets on the robot platform, using a range of metrics and criteria, including resolution, motion to photon latency, field of view, and tracking accuracy.
- Developed and maintained software tools for data analysis and visualization, using languages such as Python.
Graphics designer and VR developer of the University of Oulu Campus virtual environment model
2020 - 2021
Research Center for Ubiquitous Computing, University of Oulu
- Design 3D models of a building site on the campus, including walls, floors, ceilings, pillars, windows, doors, furniture, and props.
- Provide PBR texture materials, lighting probes, light maps, human avatars, and character animations.
- Create source codes for the interactable objects and improve the fps.
- Render high-quality applications for VR and integrate with TCP/IP for communicating with ROS2 in another platform.
Project Engineer of Immersive Robotics Telepresence
2021 - 2022
Research Center for Ubiquitous Computing, University of Oulu
- Develop and deploy an immersive telepresence robot system and scan the environment to generate the map.
- Developed and implemented control algorithms for the robot system, including motion planning and obstacle avoidance, to ensure smooth and safe operation.
- Designed and conducted user studies to evaluate the user experience and identify areas for improvement, resulting in multiple iterations and refinements of the system.
- Integrate with virtual reality to enhance the immersive experience of the telepresence system.
- Successfully deployed the telepresence system in remote sites.
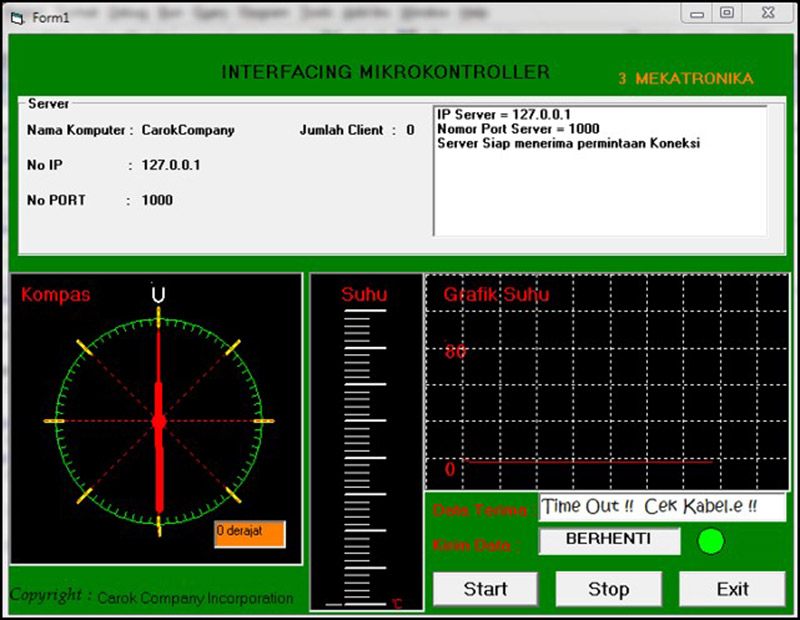
Software engineer for IMU sensor for a mobile robot platform
2019 - 2020
Research Center for Ubiquitous Computing, University of Oulu
- Develop software library for an IMU sensor sytem used on a mobile robot platform.
- Integrate the IMU sensor with other system on the robot platform, including 360degree camera.
- Conducted testing and validation of the IMU sensor system in both laboratory and field environments.
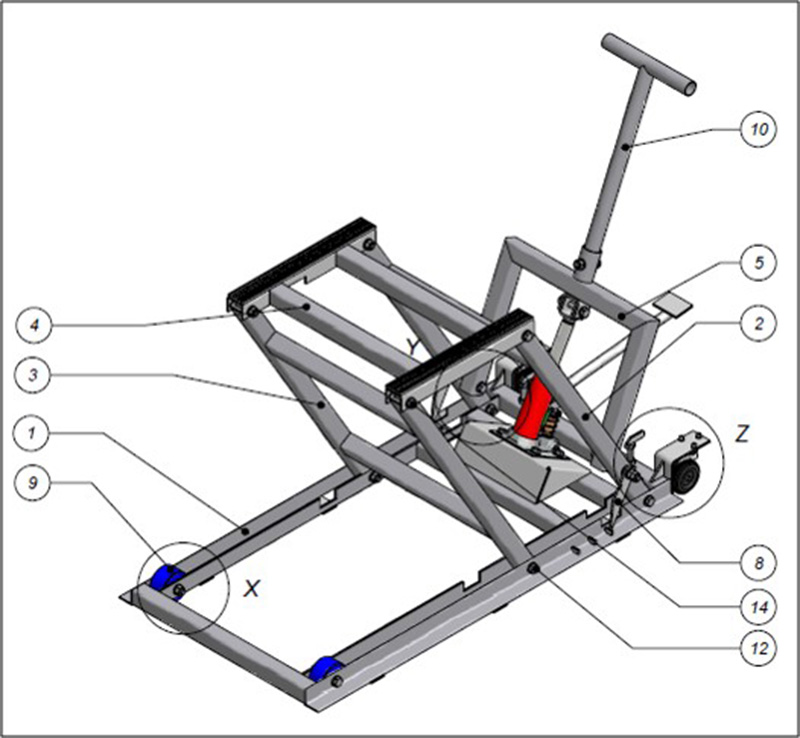
Home renovation project engineer
2021 - 2023
Research Center for Ubiquitous Computing, University of Oulu
- Design the rooftop, electrical wiring, and double power installation.
- Construct the wall sockets, terminals, RCCB, MCB, bus, lamps, and antenna.
- Provide the bill of materials.
System Business Analyst
2016 - 2018
GriyaBinangun, Consultant Property & Home Developer, Indonesia
- Supporting, maintaining, and improving the existing company's business process.
- Developing and implementing an optimal solution for the company's new business process.
- Improving and maintaining the company's business intelligent.
- Analyzing and isolating issues, making recommendations for future upgrades.
Research Student & Project Engineer
2014 - 2016
Medical Robotic Laboratory, Taiwan Tech, Taiwan
- Collaborate with the company's joint research projects.
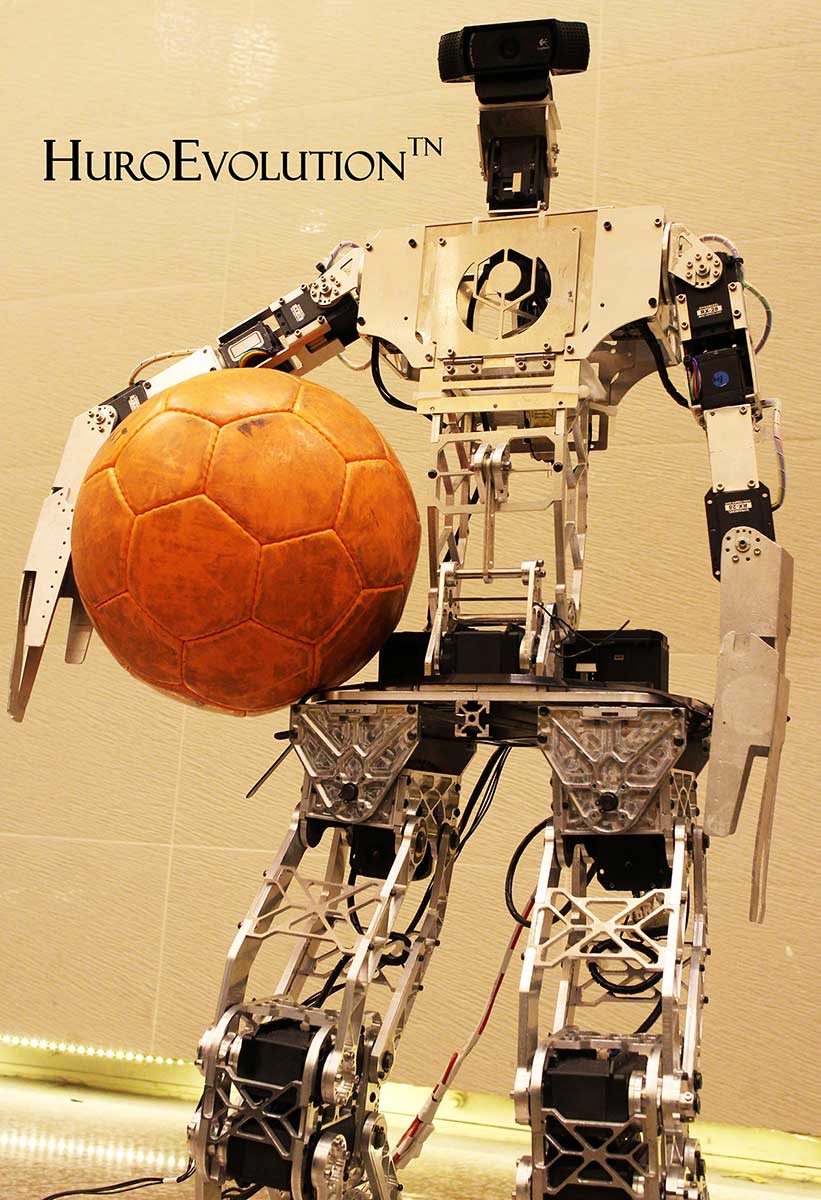
- Assist in the design and manufacture of mechanical parts of the humanoid robot.
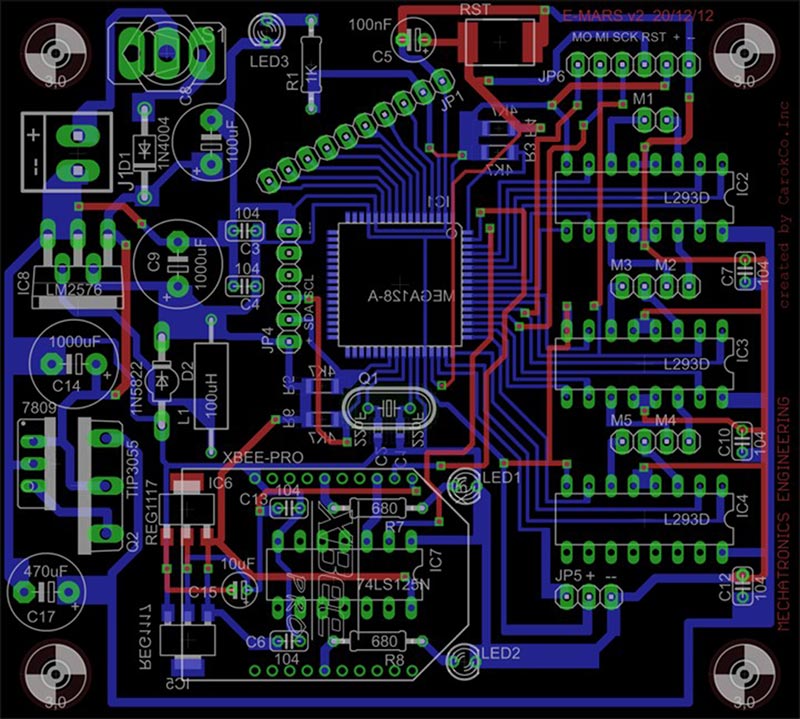
- Design and manufacture electronic circuit boards for humanoid robots.
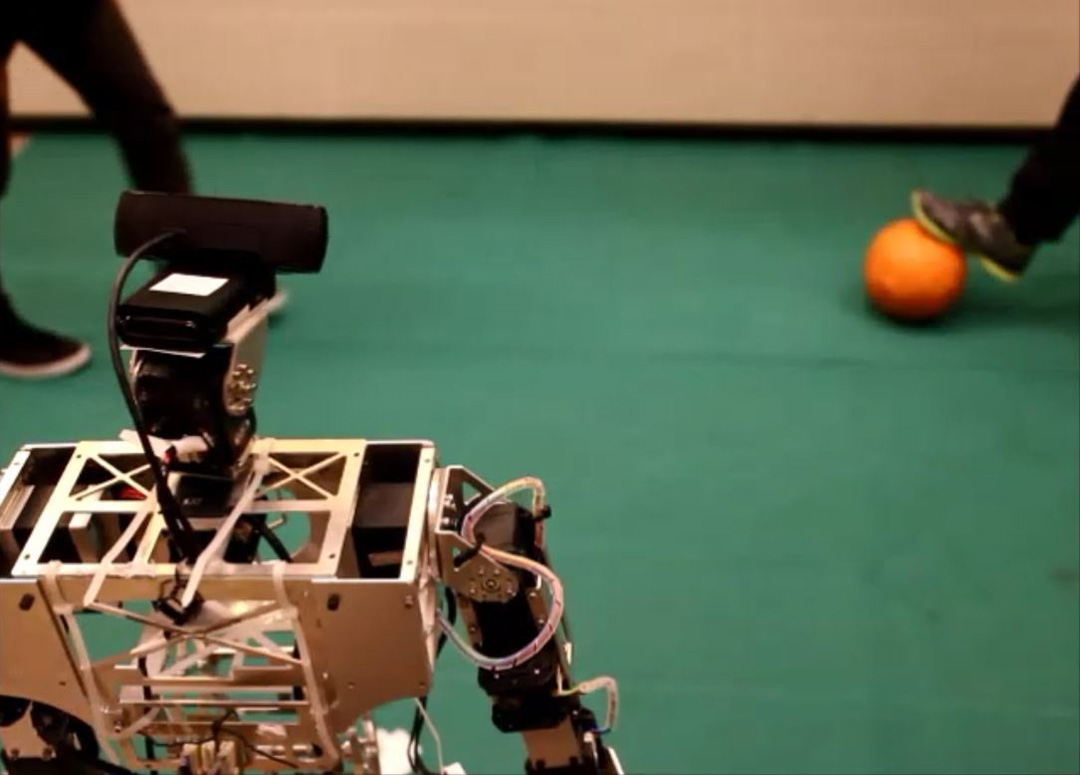
- Develop source code for the humanoid vision systems.
- Develop source code for robot behavior and decision-making for task-oriented in the competition.
- Implement a control system and artificial intelligence for the humanoid robot.
- Develop an IMU-based wearable motion capture system.
Internship
2011
PT. Djaja Sakti Sari, Cigarette Factory, Indonesia
- CAD designer & Manufacture technician.
- Maintenance of cigarette machines.
- Working on production management.
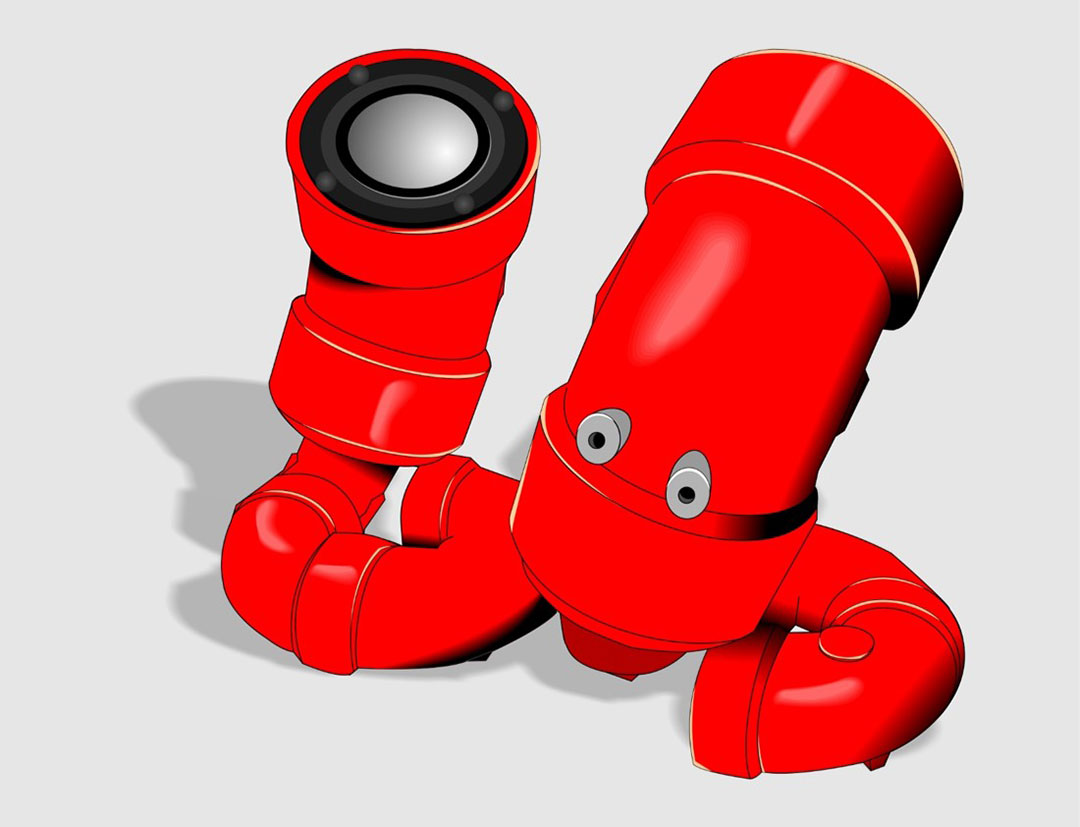
Portfolio
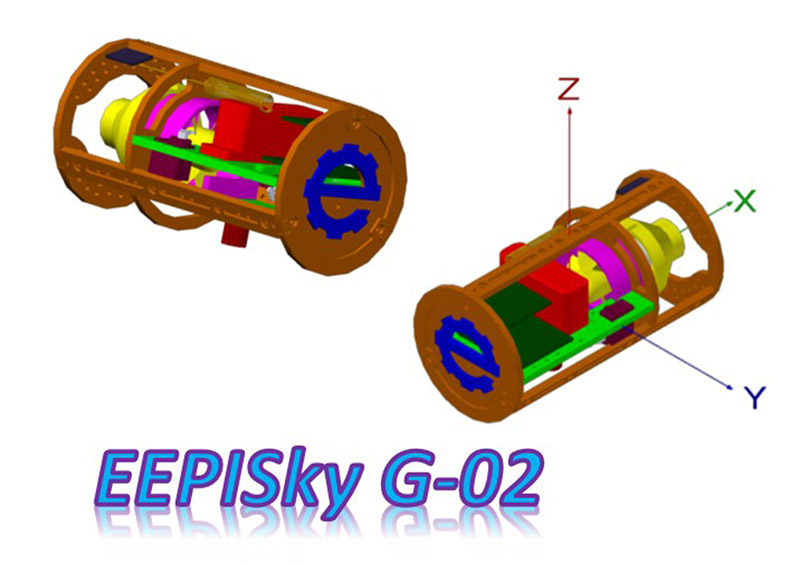
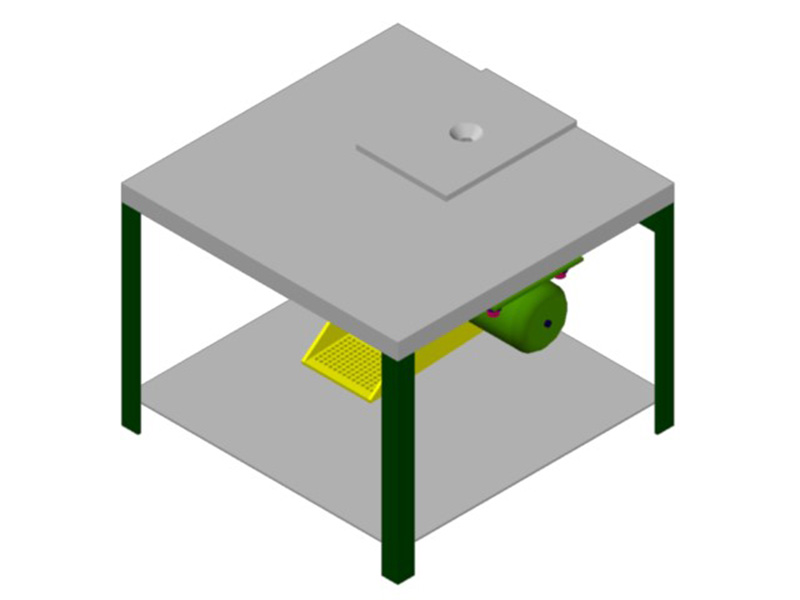
Here is the collection of my work samples. Click symbol in the image to get more detailed information.
- All
- Robotics
- VR/XR
- Other











Achievements
Awards
- Best Student Conference Paper on International Automatic Control Conference (CACS 2015).
- 2nd winner of International RoboCup 2015 in the Teen-size Soccer Game category.
- 1st winner of International RoboCup 2015 in the Teen-size Technical Challenge category.
- 3rd winner of the HuroCup Adult Size-All Round category at the 2015 International Intelligent Humanoid Robotics Competition.
- 2nd winner of the HuroCup Adult Size-Marathon category at the 2015 International Intelligent Humanoid Robotics Competition.
- 2nd winner of the HuroCup Adult Size-Obstacle Run category at the 2015 International Intelligent Humanoid Robotics Competition.
- 1st winner of the HuroCup Adult Size-Sprint category at the 2015 International Intelligent Humanoid Robotics Competition.
- National Presenter Award of PIMNAS XXVI, 2013.
- 3rd winner of EEPIS Final Project Competition, 2013.
- Certification of Second Winner for Joining the PNU-EEPIS International Collaborative Project-Creativity Station on Engineering Service Learning, 2013.
- Certificate of Membership of Engineering Service Corps of Pusan National University Innovation Center for Engineering Education, 2013.
- 1st Winner of Indonesian National Payload Rocket Competition (Komurindo 2011).
- 1st Winner of Indonesian National Rocket Competition (Korindo 2010).
Theses Book
- Wearable Motion Tracking System using Quaternion-based Complementary Filter Algorithm with Inertial Measurement Units.
- Design and Construction of Multi-agent Robot Soccer: Localization & Synchronization of Multi-agent Robot Soccer based on Visualization
Funding & Scholarship
- Four years of prestigious UniOGS Infotech ITEE funding for conducting research. 2019-2023
- Three years of 6 Genesis Flagship funding for conducting research. 2019
- MRL-Taiwan company joint funding for conducting projects on the wearable motion capture device. 2015-2016
- Prestigious funding from the Taiwan National Science Council, Taiwan Ministry of Education, and Foxconn company for working on Humanoid Teen-size robot projects. 2014-2016
- Ministry of Higher Education (DIKTI) funding in the category of PKM-P program for conducting the Multi-agent Robot Soccer projects. 2012-2013
- South Korea PICEE and EEPIS funding on the international collaborative projects in engineering service corps. 2013
- EEPIS funding for conducting projects on the payload rockets competitions of Korindo 2010 and Komurindo 2011 events. 2009-2011
- Ministry of Higher Education (DIKTI) funding in the category of PKMM program for conducting school education towards robotics line follower workshop. 2010-2011
- Ministry of Higher Education (DIKTI) funding in the category of PKMM program for conducting school education towards design & manufacture of the electronic circuit of mobile robot platform. 2010-2011
- Two years scholarship of master student awardee of Taiwan Tech. 2014-2016
- Three years of government scholarship awardee of PPA-DIKTI. 209-2012
- One year scholarship for best student nomination awardee. 2012
Poster
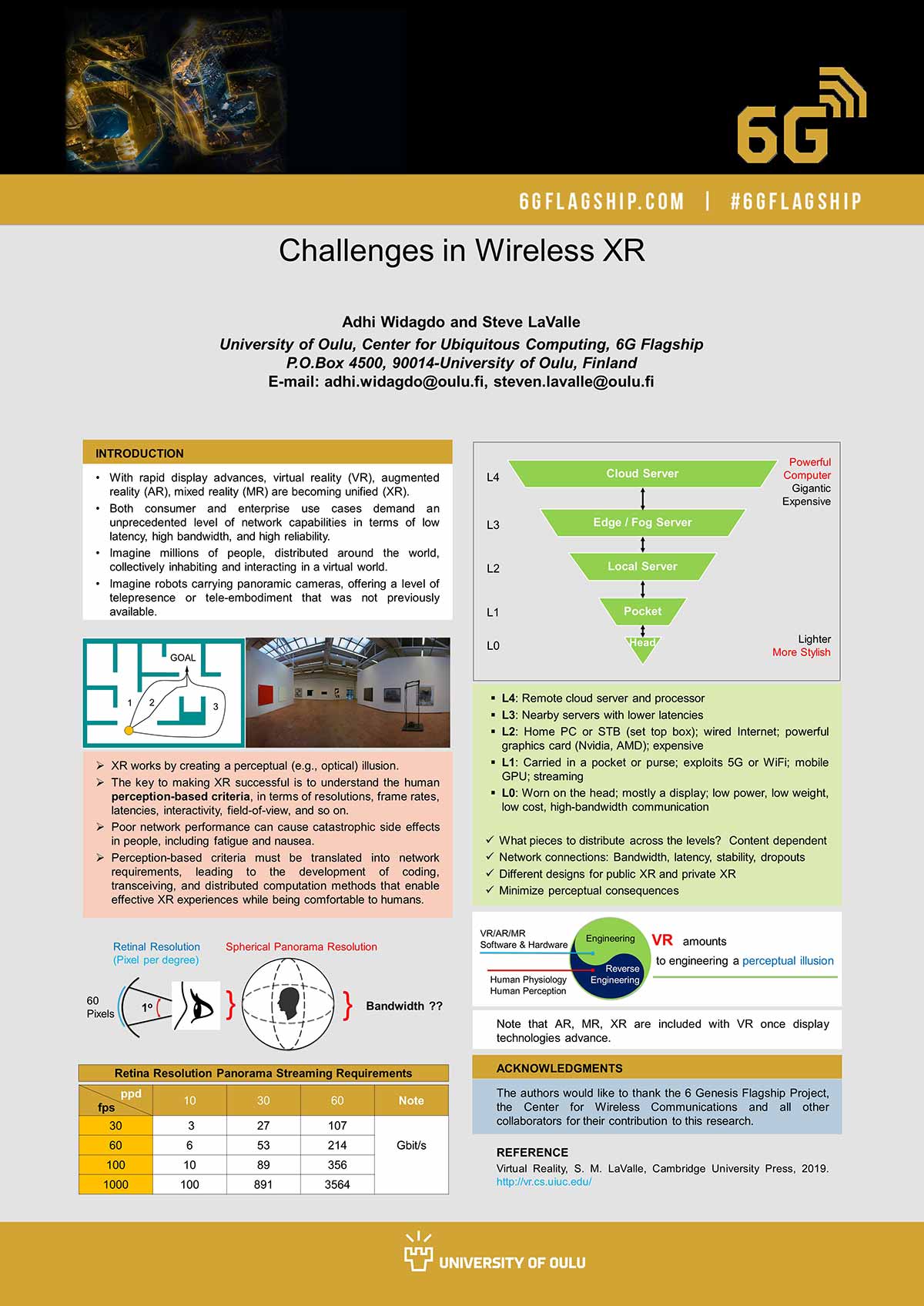
- Adhi Widagdo & Steve LaValle. Challenges in Wireless XR. 6G Flagship. Click here
- Adhi Widagdo, Renita Urrosyda, Ermita Rachmawati, & Indra Adji. Sistem Koordinasi & Kecerdasan Buatan untuk Strategi Bertanding pada Robot Soccer. PIMNAS XXVI DIKTI. Click here
{kind=link}
{kind=link}
Publication
- M. Suomalainen, B. Sakcak, A. Widagdo, J. Kalliokoski, K. J. Mimnaugh, A. P. Chambers, T. Ojala, and S. M. LaValle, "Unwinding Rotations Improves User Comfort with Immersive Telepresence Robots," in the 2022 ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2022.
- P. A. C. Widagdo, H. H. Lee, and C. H. Kuo, "Limb motion tracking with inertial measurement units," in 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2017, pp. 1551-1556, doi: 10.1109/SMC.2017.8122818.
- I. W. D. Pranata, A. C. Widagdo, A. P. Yudha, and C. H. Kuo, "Development of a Biped Teen-Size Humanoid Robot for Participating in RoboCup 2015 Competition," in 2015 CACS International Automatic Control Conference, 2015, pp. 232-236, doi: 10.1109/CACS.2015.7393872.
- C. H. Kuo, A. P. Yudha, A. C. Widagdo, S. W. Prakosa, and I. W. D. Pranata, "Team Description Paper: HuroEvolutionTN Humanoid Robot for RoboCup 2015 Humanoid League," in 2015 Robocup Humanoid, Hefei-China, 2015, pp. 1-8.
- I. A. Sulistijono, P. A. C. Wicaksono, and E. S. Ningrum, "Dynamic movement of multi-agent robot soccer based on visualization," in 2014 IEEE conference, 10th France-Japan / 8th Europe-Asia Congress on Mechatronics, 2014, pp. 1-6, doi: 10.1109/MECATRONICS.2014.7018356.
- P. A. C. Widagdo, E. D. Rachmawati, R. Chulafaurrosyda, and I. A. Sulistijono, "Sistem Koordinasi dan Kecerdasan Buatan untuk Strategi Bertanding pada Robot Soccer," artikel DIKTI PKM-P, 2013.
References

Prof. Timo Ojala
Director of the Center for Ubiquitous Computing & Perception Engineering Group Line Manager

Prof. Steven LaValle
Principal Investigator of Perception Engineering Group & Supervisor

Prof. Mehdi Bennis
Chairman of the Intelligent Connectivity and Networks/Sytems Group at the Center for Wireless Communication

Associate Prof. Georgi Georgiev
Chairman of the Design Research group

Dr. Matti Pouke
Postdoctoral Researcher at the Perception Engineering group

Dr. Anna LaValle
Lecture in the Computer Science & Engineering department

Dr. Anabela Berenguer
Administrator & Specialist at the Center for Ubiquitous Computing

Dr. Evan Center
Postdoctoral Researcher at the Perception Engineering group
Contact via email: firstname.lastname@oulu.fi