Project information
- Category: Master Thesis
- Funding: MRL-Taiwan Company
- Project date: 2015-2016
IMU Motion
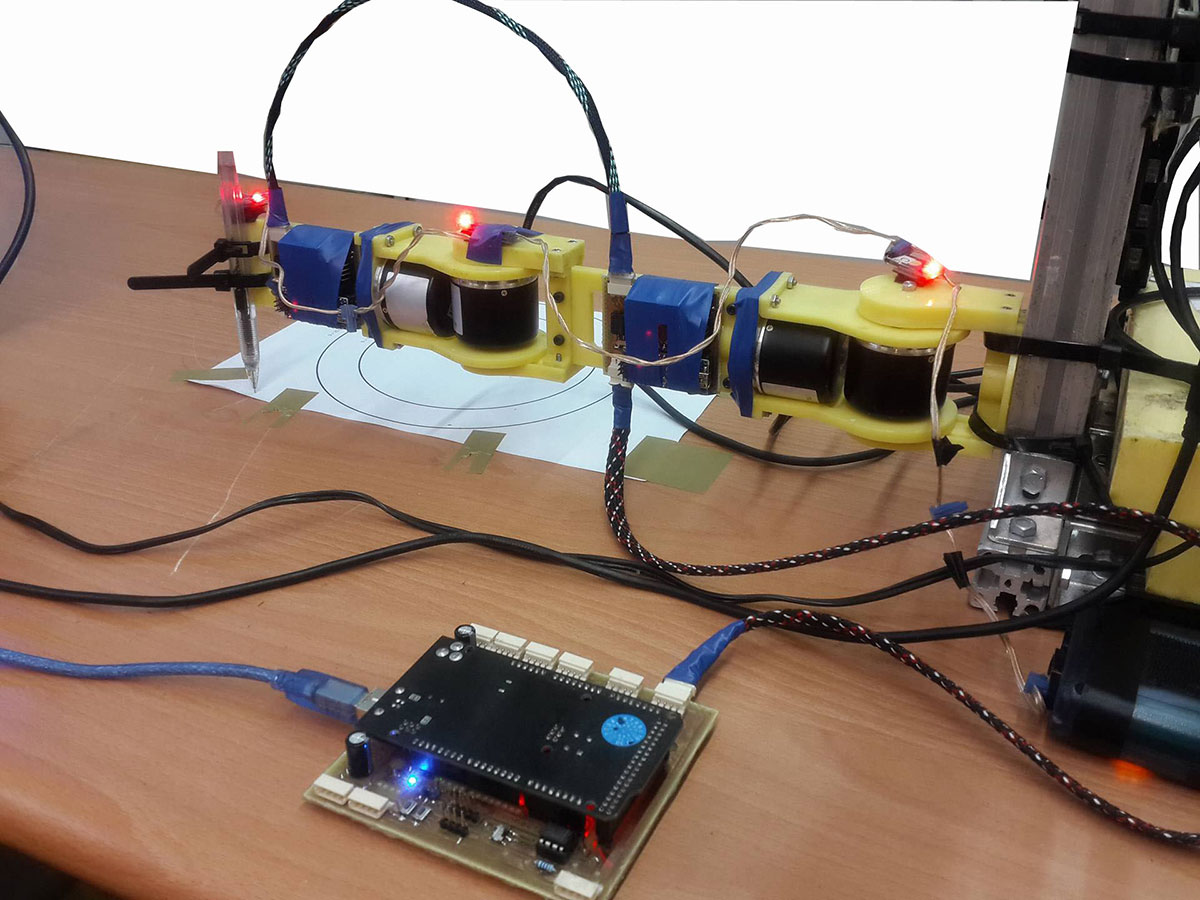
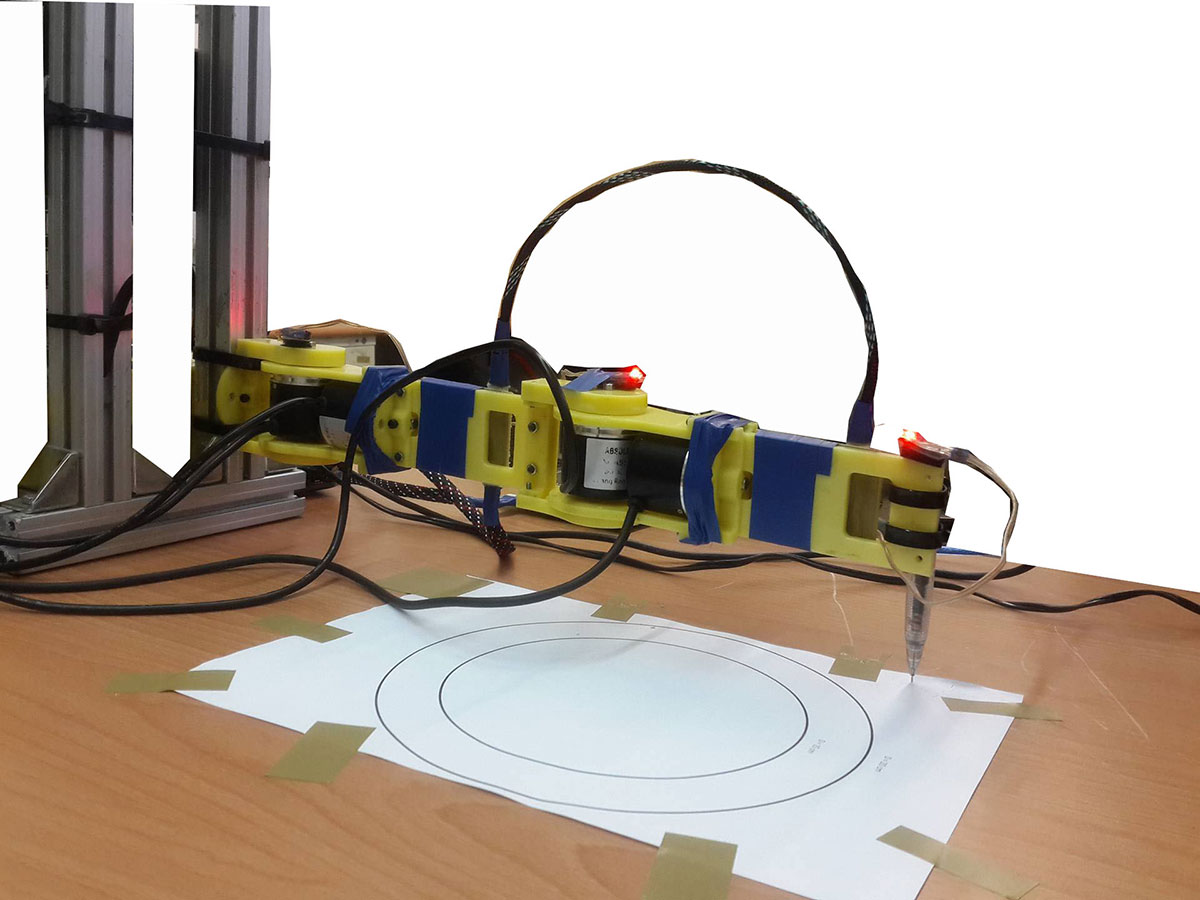
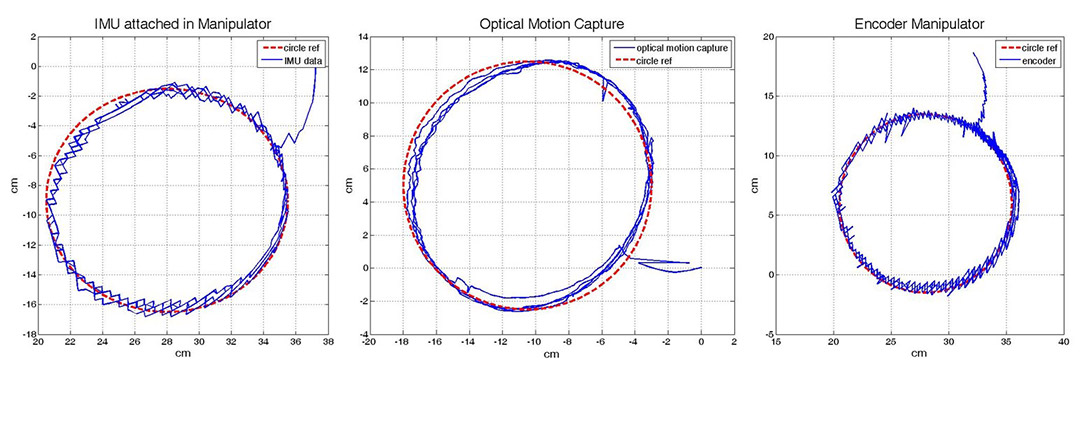
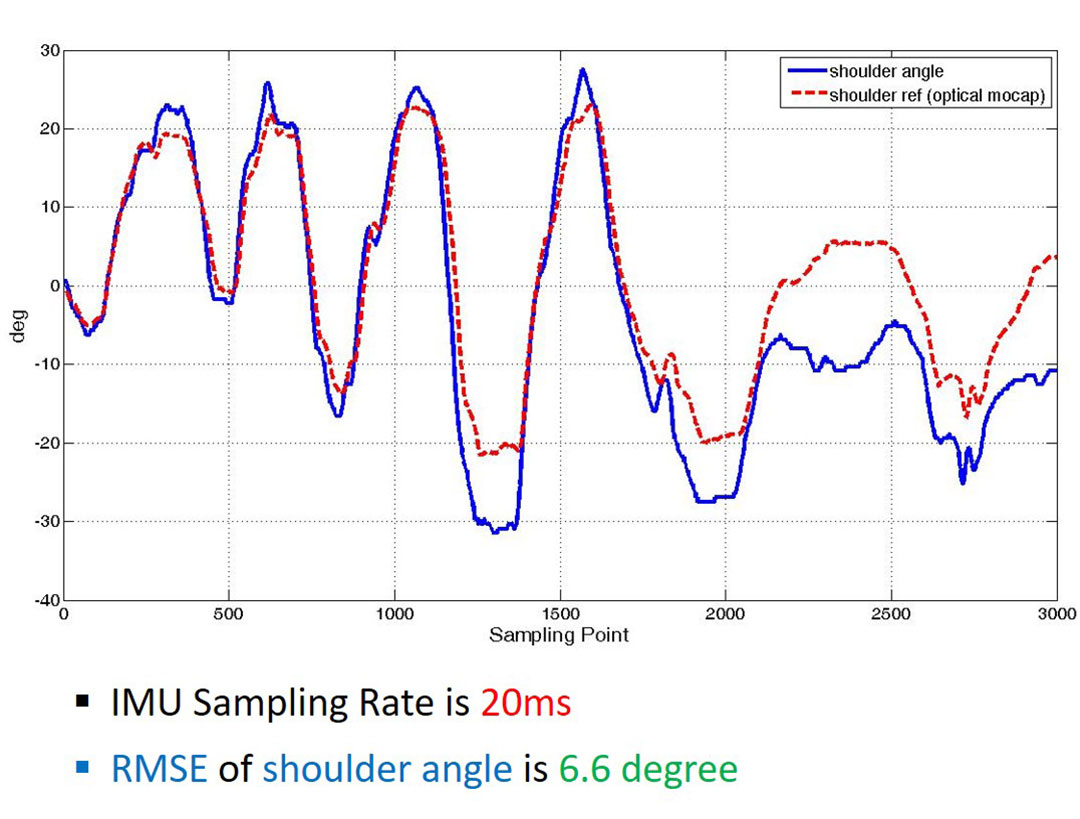
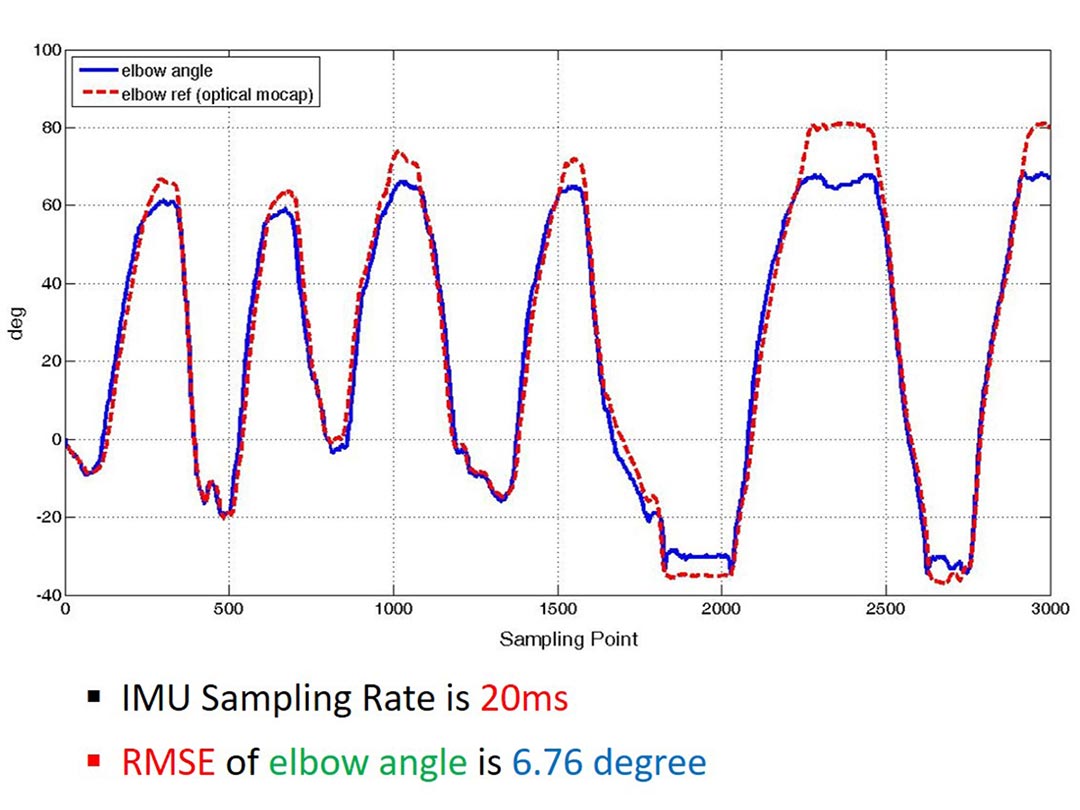
In this project, we conducted a comprehensive test to verify the reliability of the IMUs attached to the arm manipulator. Our approach involved tracking a cylindrical picture using the IMUs, along with the use of optical motion capture and encoders. To analyze the data, we utilized forward kinematics to compare the end effector position of the arm manipulator and its track line. The aim was to test the accuracy and consistency of the IMUs in capturing the motion of the arm manipulator. The results showed that the IMUs were able to track the cylindrical picture with a high degree of accuracy, and the output data obtained were reliable and consistent. Our project demonstrated the potential of using IMUs in motion capture applications, particularly in situations where optical motion capture may not be feasible or practical.