

Project information
- Category: Bachelor Thesis
- Funding: DIKTI-PKMP
- Project date: 2012-2013
Multi-agent Robot Vision Systems
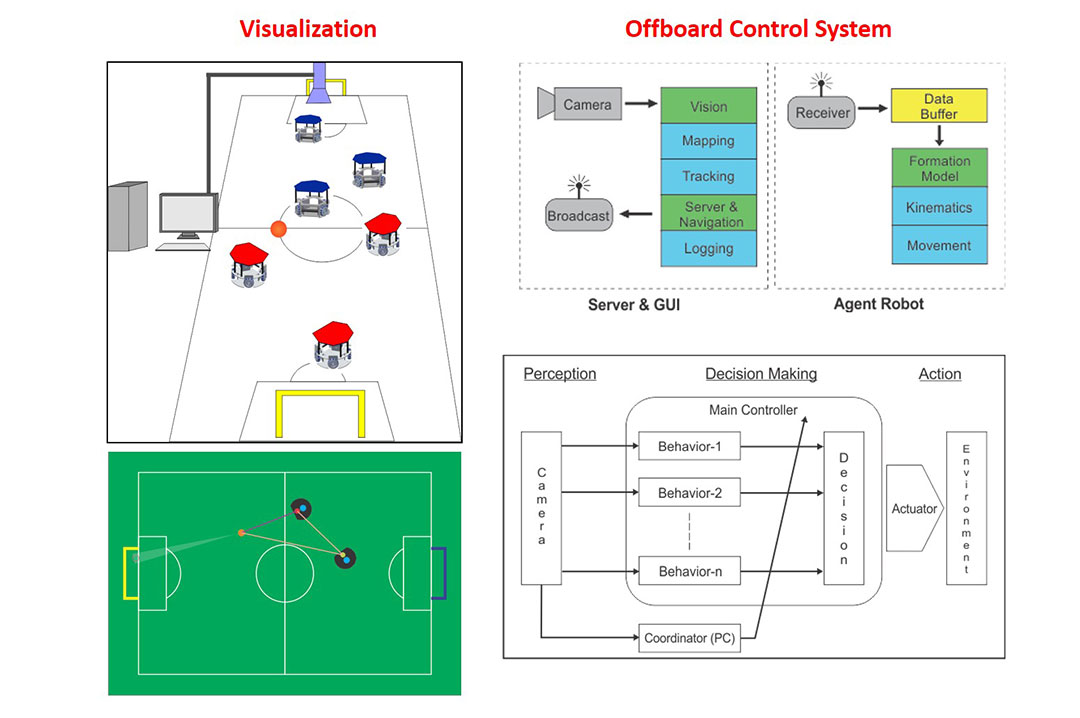
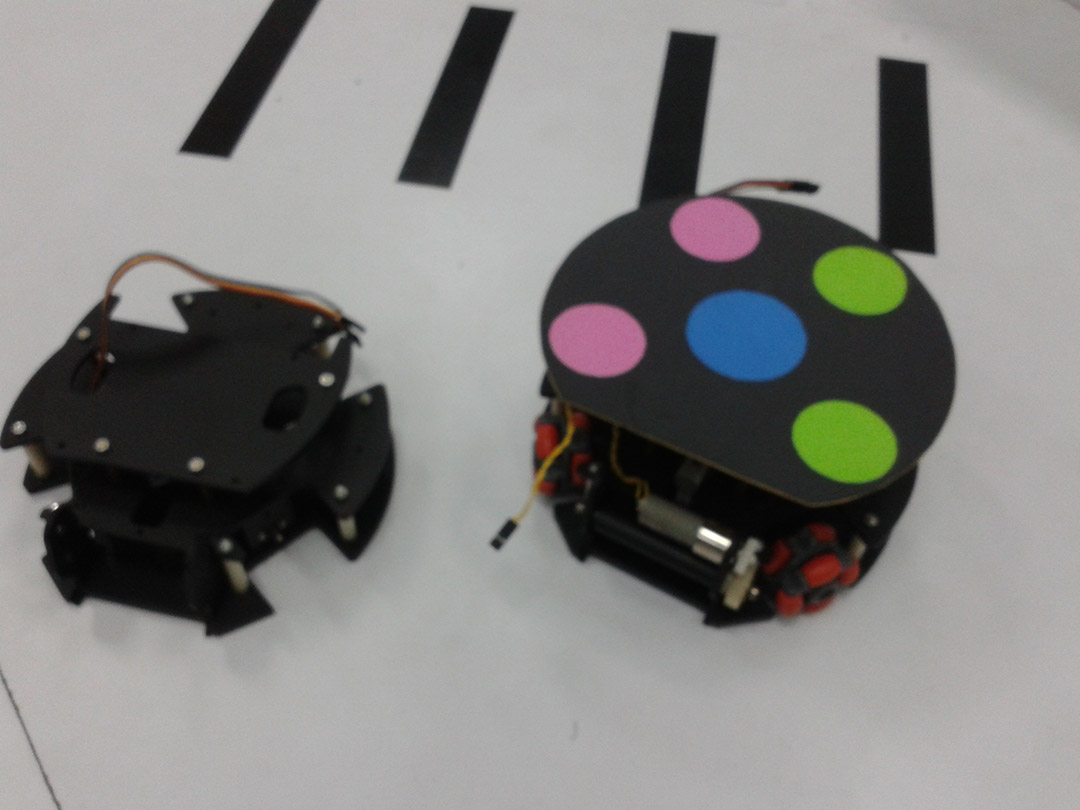
In this project, I developed an innovative autonomous control system for multi-agent robot soccer
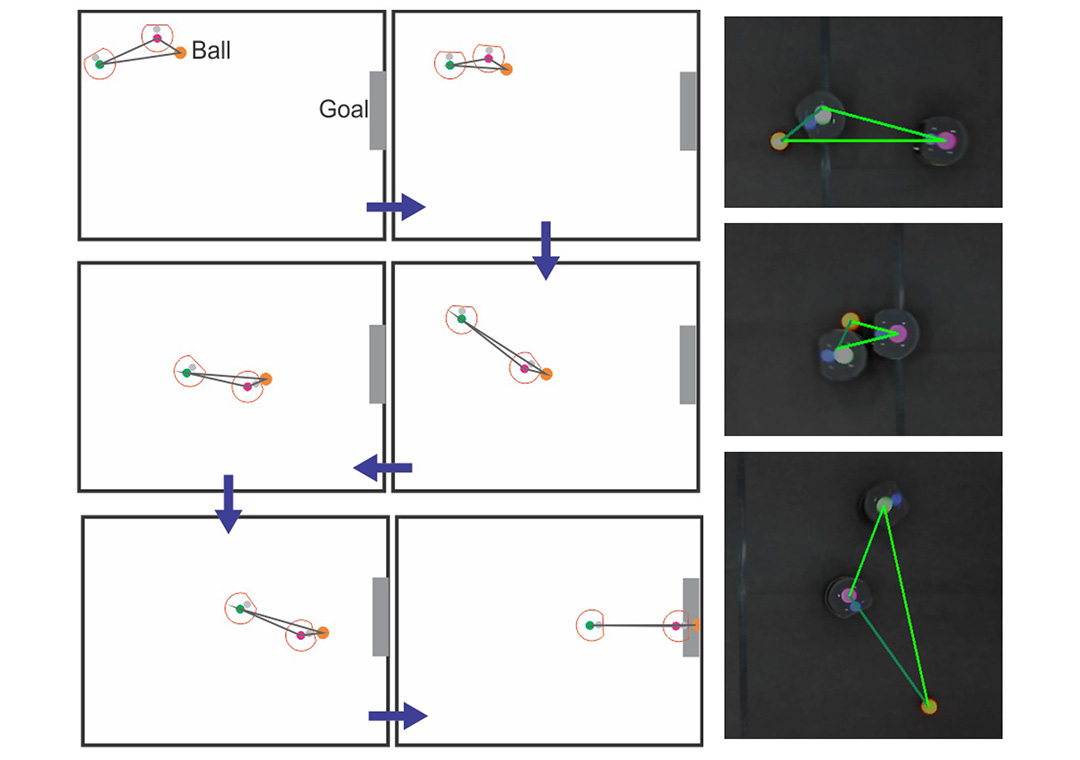
that is capable of realizing the holonomic movement of two agent robots in order to find the ball and dribble it towards the goal.
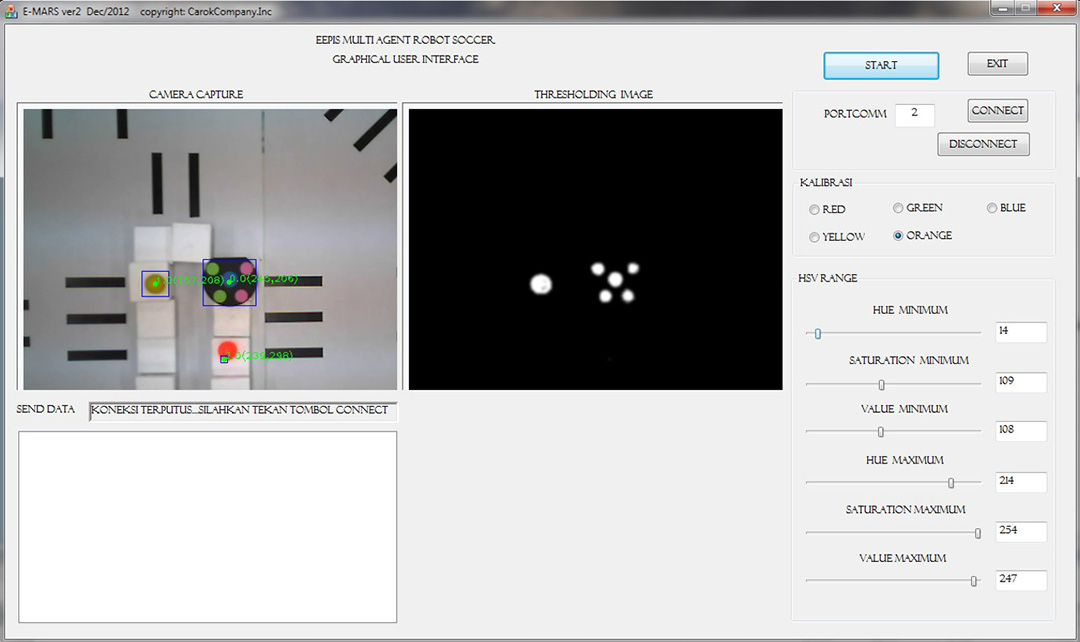
The movement of these robots is based on a camera visualization system, which involves image segmentation for color detection, marker detection, and ball detection.
To facilitate decision-making, a leader-follower hierarchy was implemented based on the nearest point between the agent and the ball.
This system has been recognized for its excellence, receiving numerous awards and accolades, including funding from DIKTI through the PKM-P program, certification of National Presenter Award of PIMNAS XXVI,
and being the 3rd winner of the EEPIS Final Project Competition.
The project has also been published in academic conferences and was featured in a 2013 Artikel DIKTI PKM-P.
Overall, this project showcases my expertise in multi-agent robot vision systems and my ability to develop innovative solutions for complex problems.