Project information
- Category: Master Thesis
- Funding: MRL-Taiwan Company
- Project date: 2015-2016
Accuracy of IMU Sensor
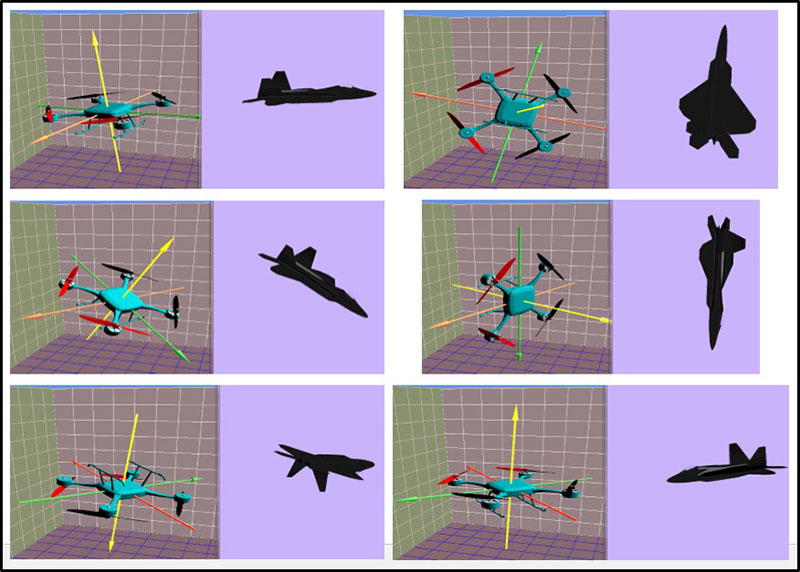
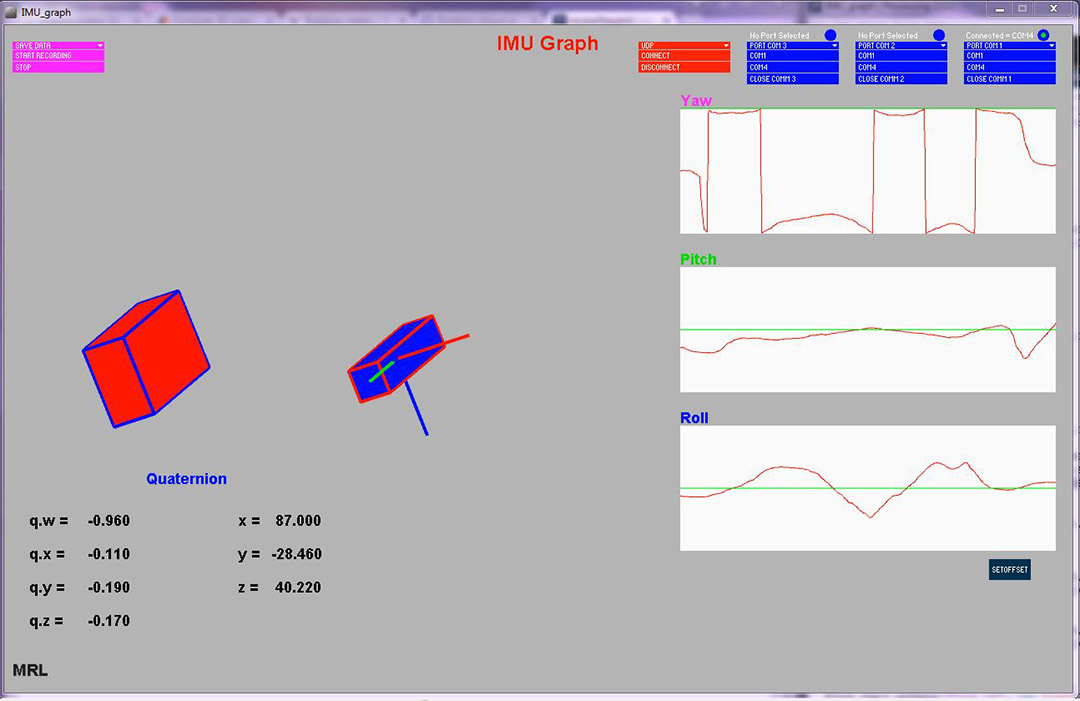
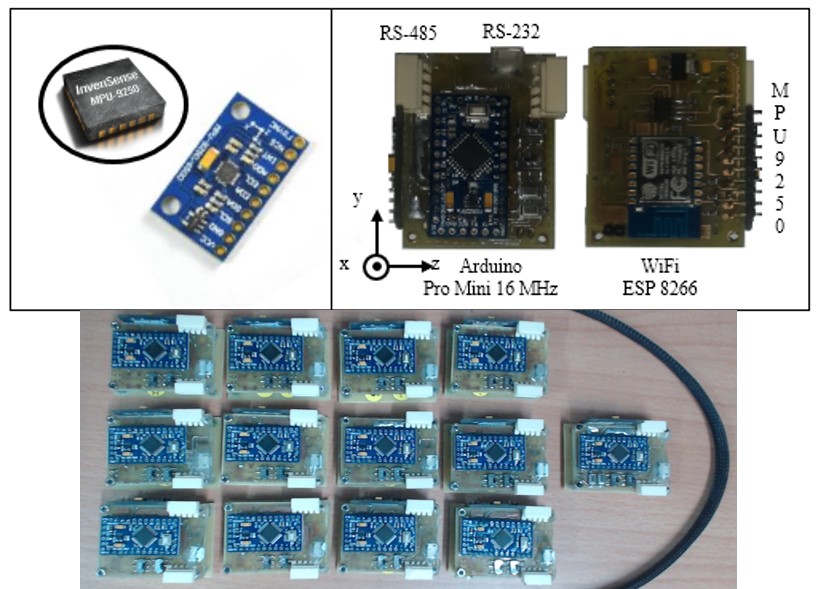
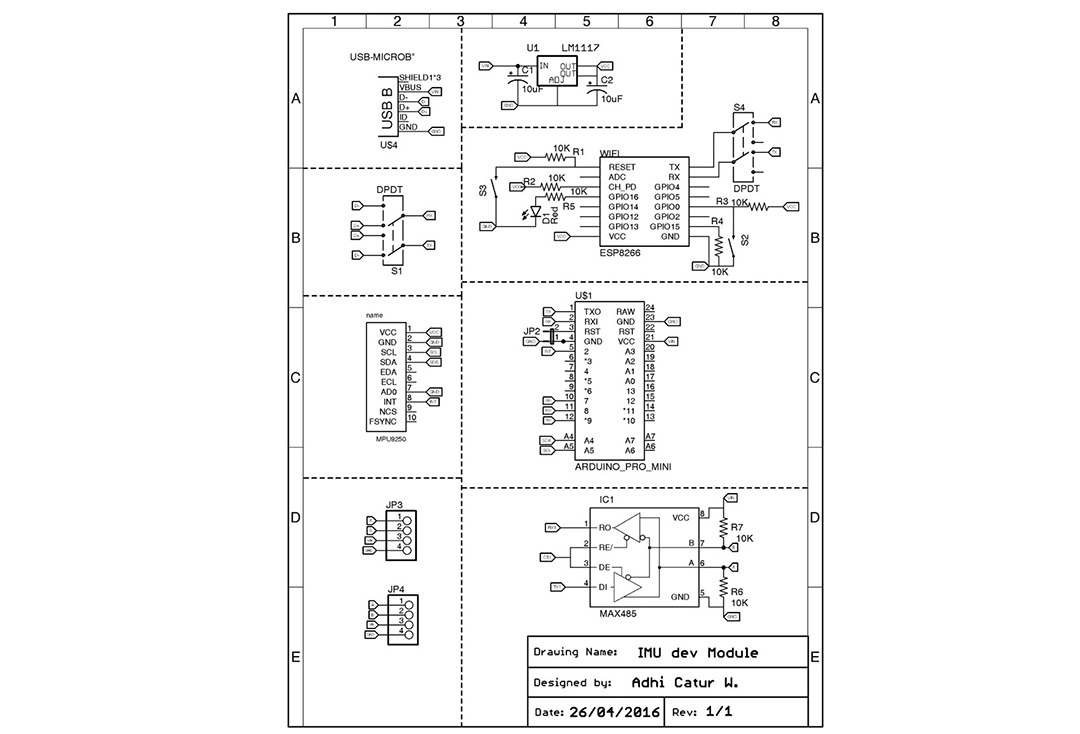
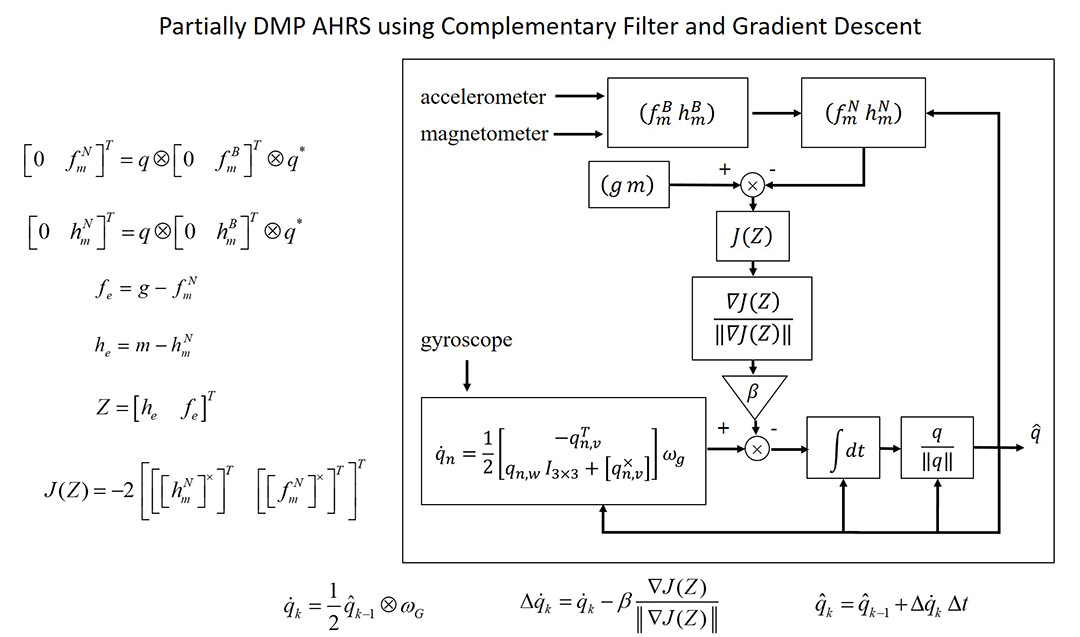
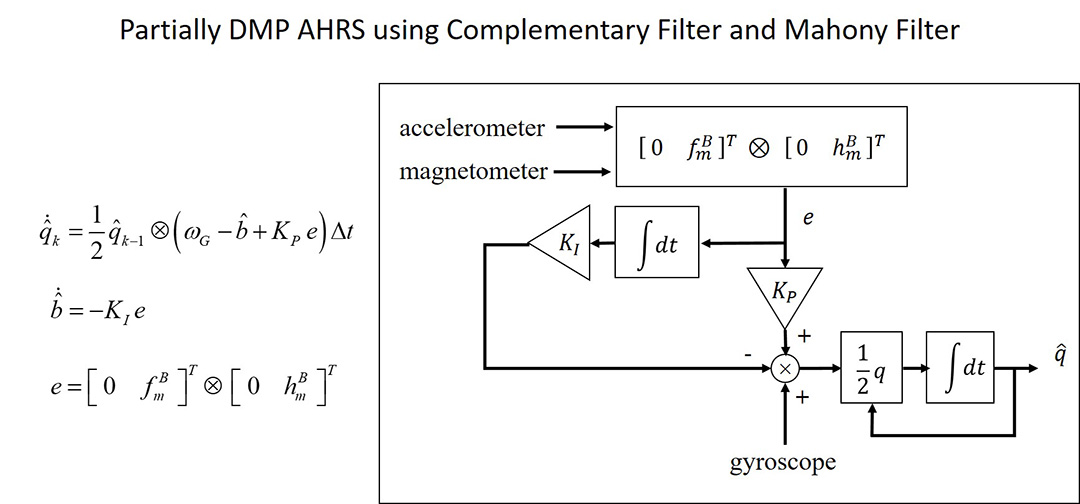
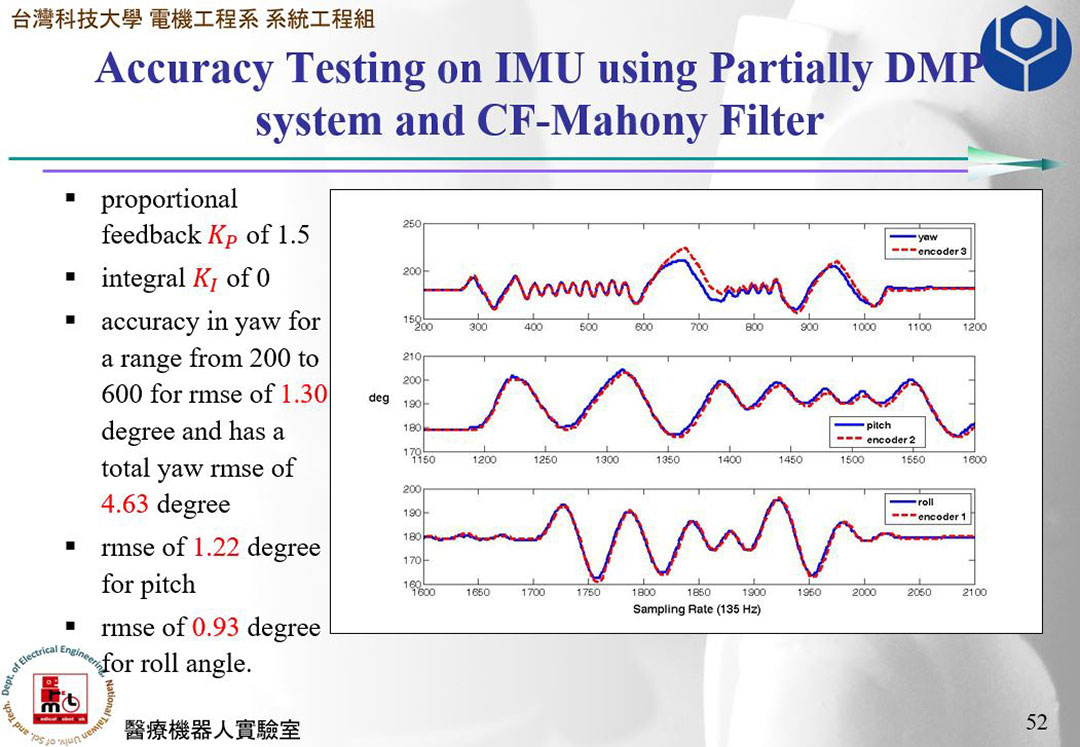
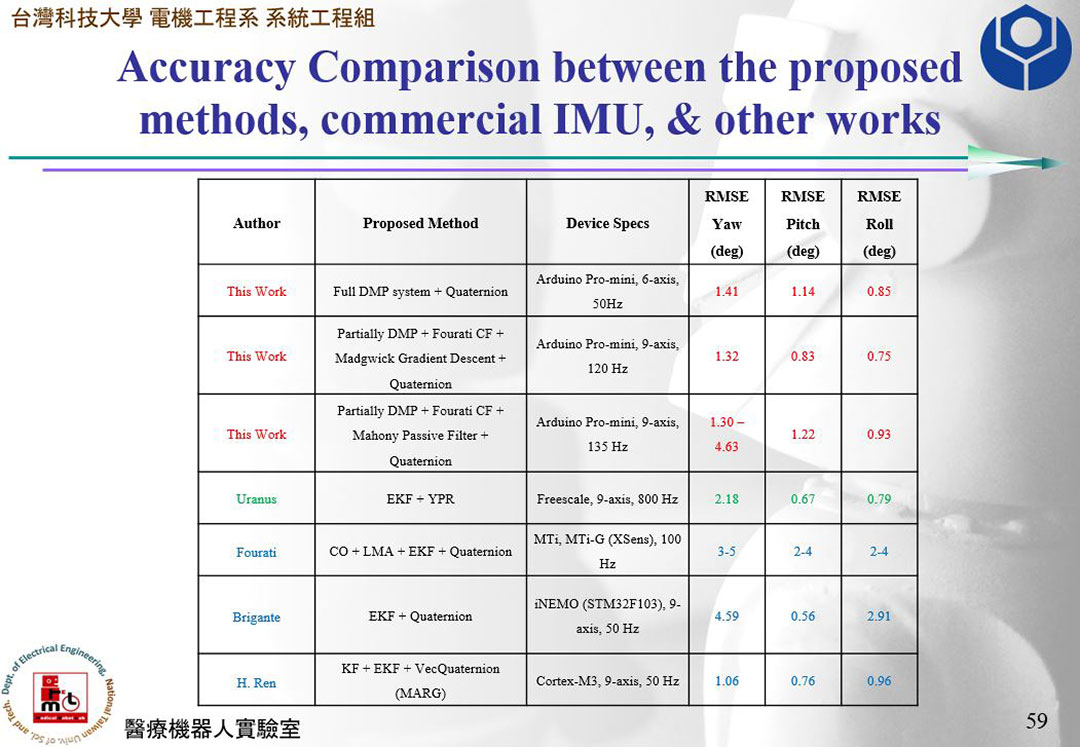
In my portfolio project, I tackled the challenge of achieving high accuracy in motion tracking with an IMU-based wearable motion capture device. To do this, I developed a modular architecture that includes 13 IMU module devices attached to the human body to reconstruct the 3D trajectory of human movement. I implemented a quaternion-based approach and employed several methods to achieve accurate orientation estimation, including a digital motion processor for direct calculation of accurate data inside the sensor itself, a complementary filter fused using a gradient descent algorithm, and a combination of the complementary filter with a Mahony filter.
All of these approaches were designed to work with a digital motion processor system to minimize accumulative error.
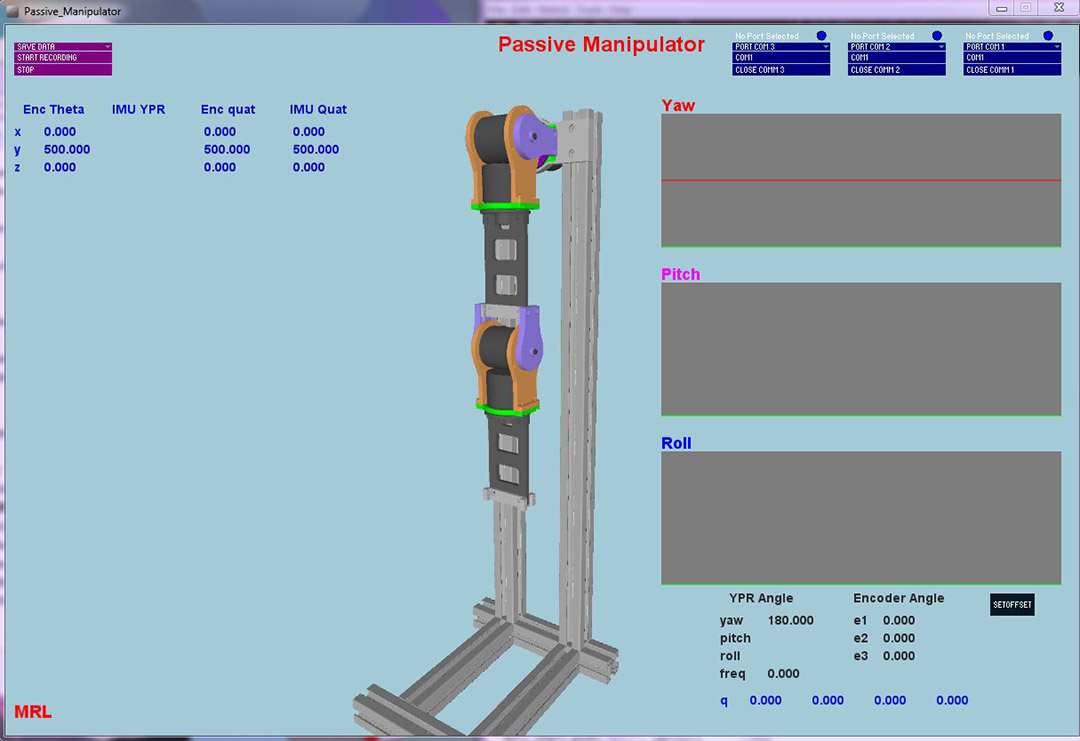
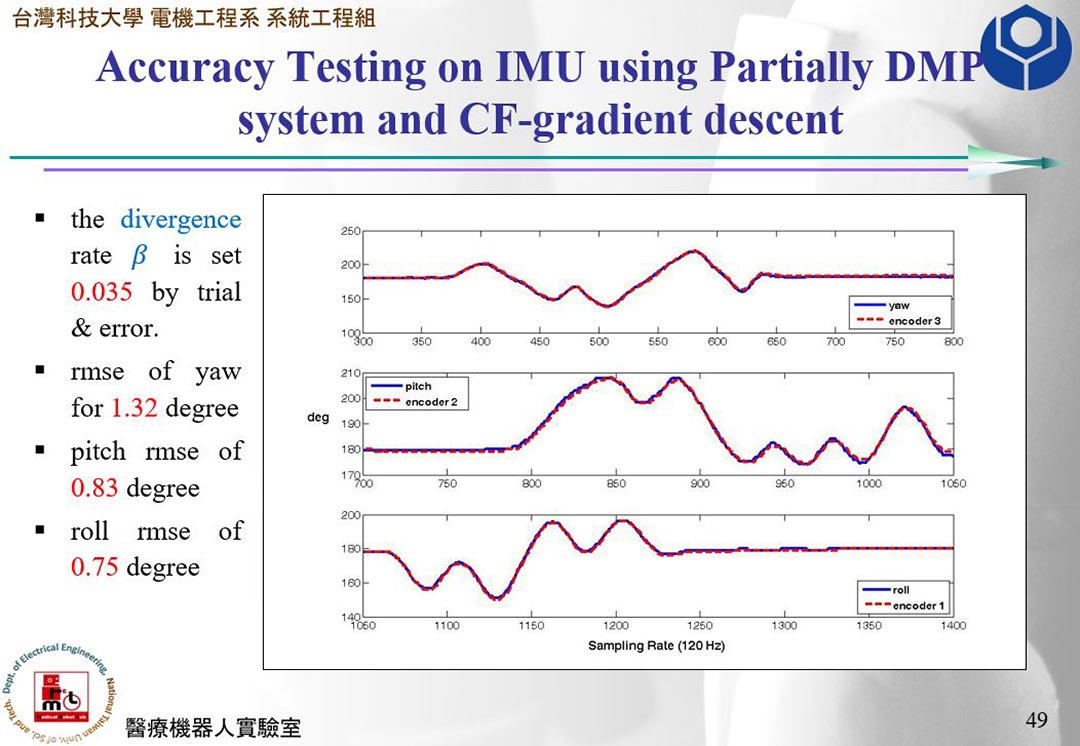
I validated my results by comparing them with a passive manipulator robot containing encoders and found that all of the proposed methods achieved acceptable performances and accuracy for orientation,
with the lowest root mean square error (RMSE) values being 0.75 degrees.
Additionally, my IMU-based wearable motion capture system was able to reconstruct a human skeletal animation with an RMSE of 6.76 and 6.6 degrees for the shoulder and elbow, respectively,
at a sampling rate of 24 frames per second.
Overall, my project successfully addressed the challenge of achieving high accuracy in motion tracking with an IMU-based wearable motion capture device,
paving the way for improved performance in various applications, including sports training, biomechanical analysis, and rehabilitation.