Project information
- Category: Competition
- Funding: Taiwan NSC, MoE
- Project date: 2014-2015
HuroEvolutionTN Vision Systems
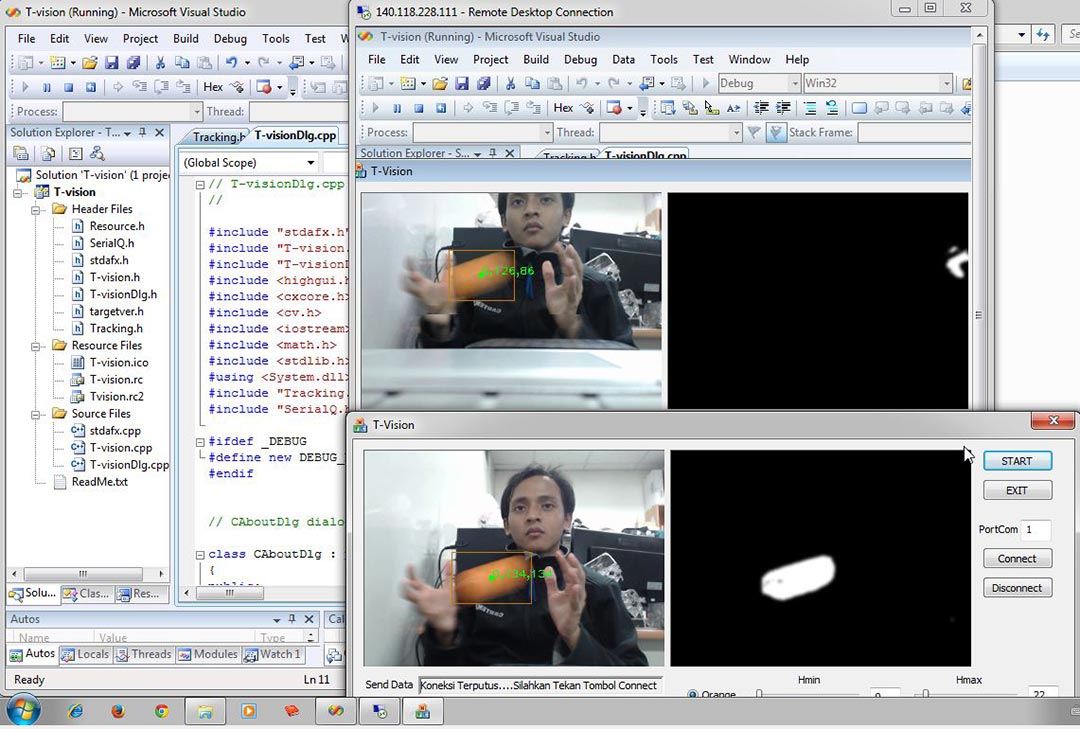
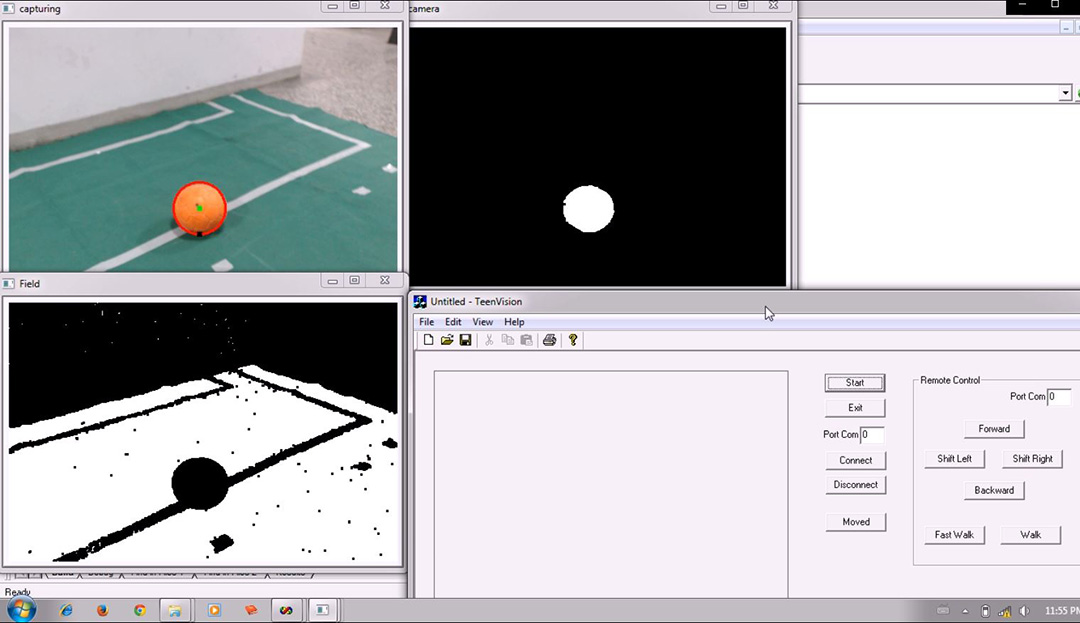
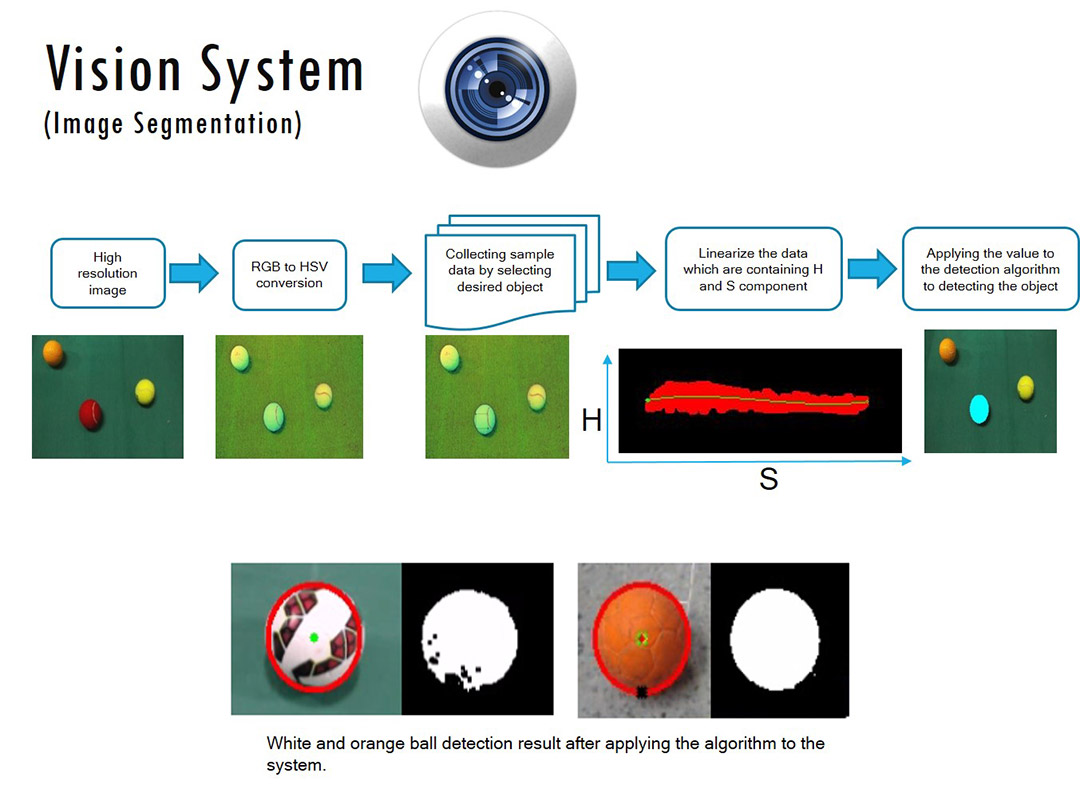
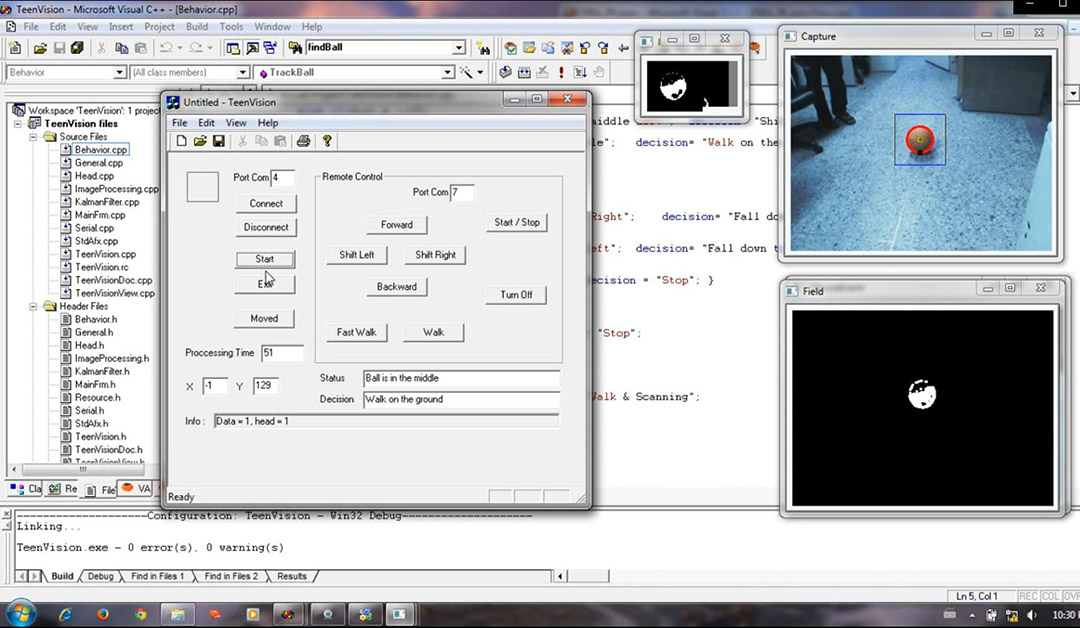
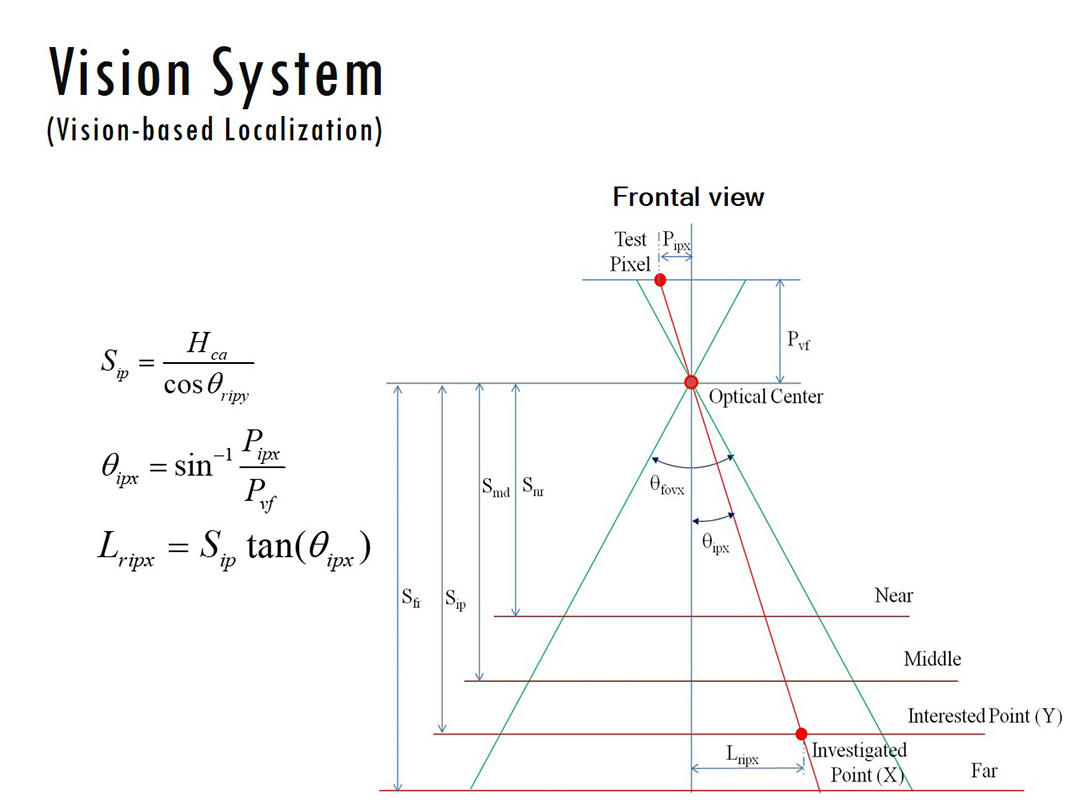
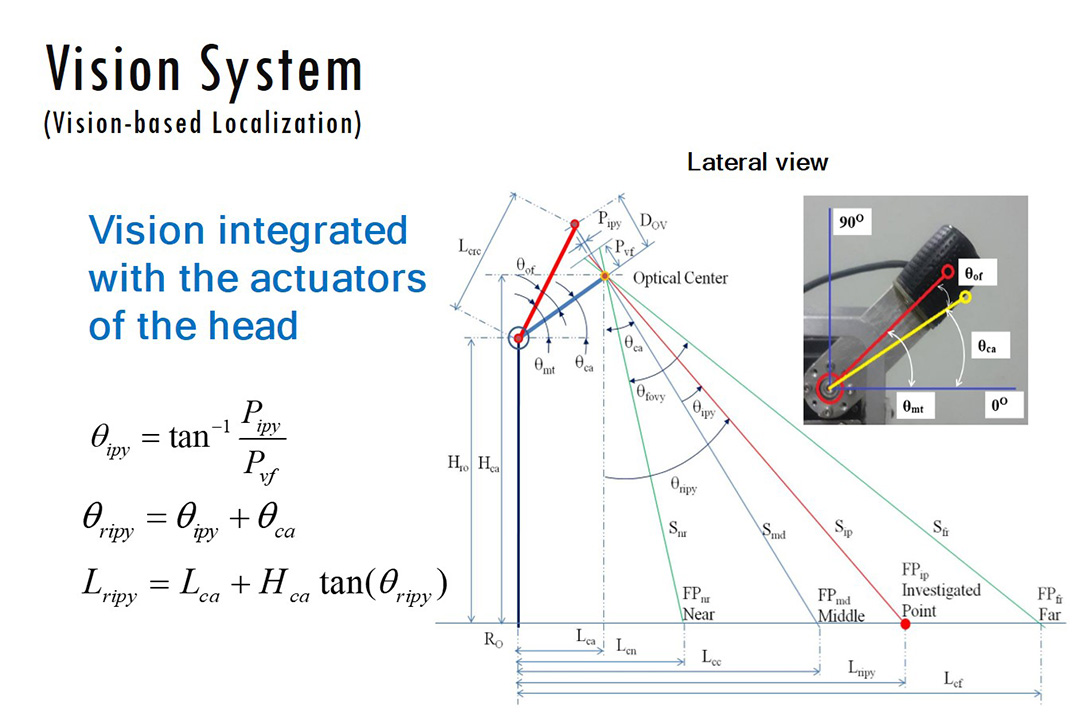
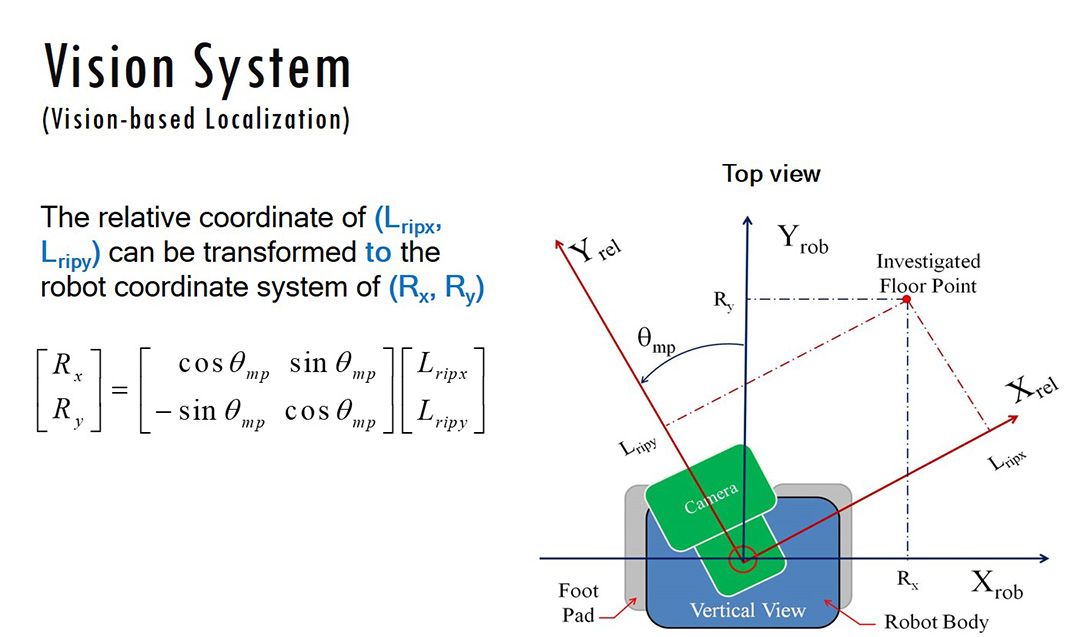
As a member of the team that developed HuroEvolutionTN, I was heavily involved in the vision systems that were crucial to the robot's functionality. One of our key accomplishments was the development of a fast tracking algorithm based on color detection and vision-based localization. To achieve accurate color detection, we implemented an HS color space conversion, which allowed us to identify the desired object while minimizing the impact of light interference. We also applied linear regression on the HS histogram to improve accuracy in color detection. Additionally, we used Kalman Filter to predict the movement of the ball during gameplay.
Preprocessing of the images was particularly important for accurate image stabilization, given the dynamic movement of the robot and potential light interference. We also developed sophisticated behavior and decision-making systems for the robot, which were essential to completing the given task. It was truly an honor to work on such an innovative and cutting-edge project, and I'm proud to have contributed to the development of HuroEvolutionTN's vision systems.