Project information
- Category: Competition
- Funding: Taiwan NSC, MoE
- Project date: 2014-2015
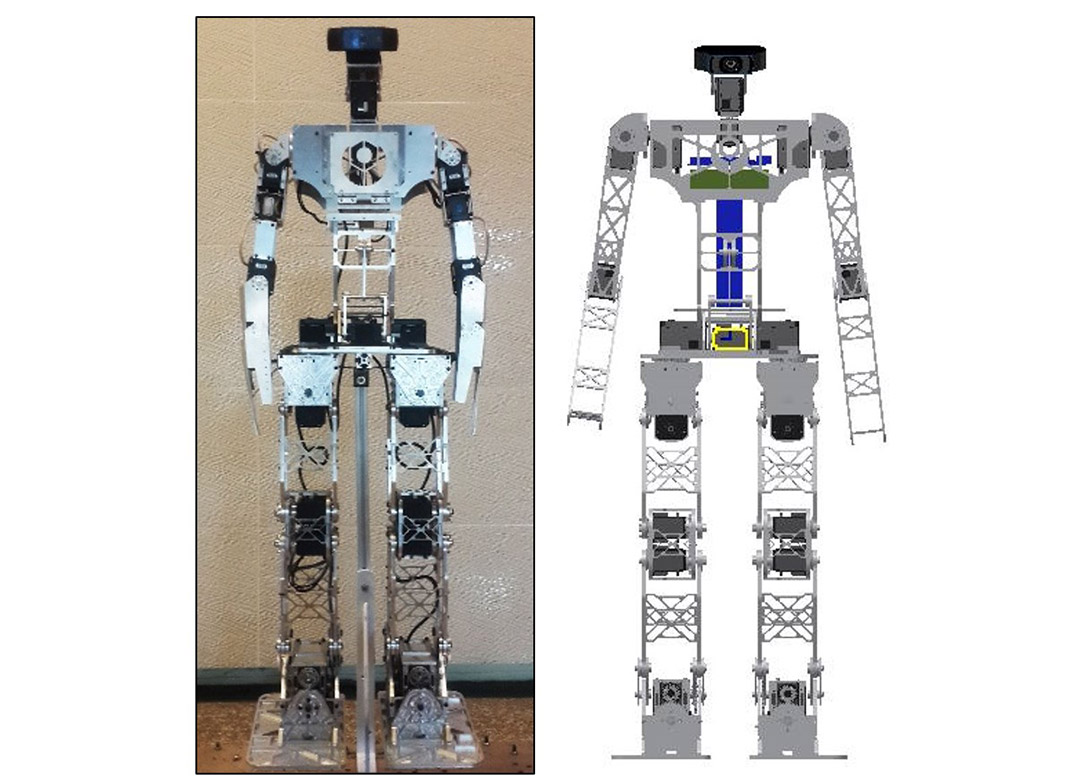
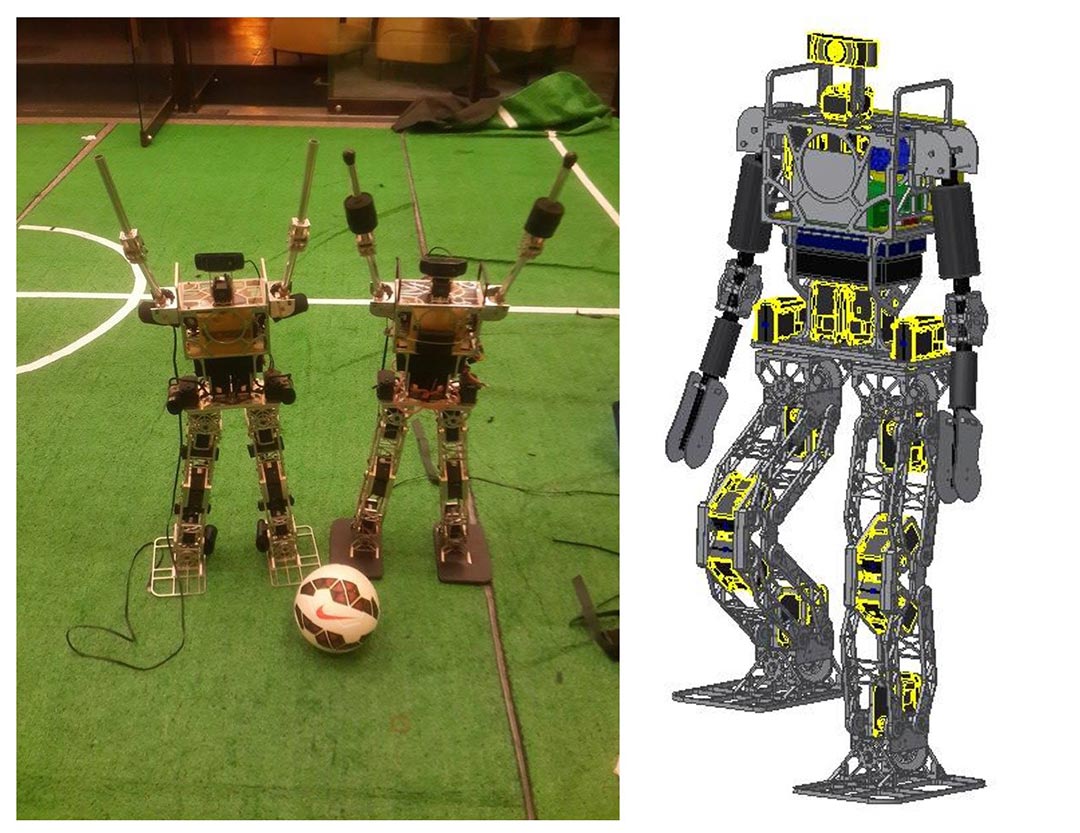
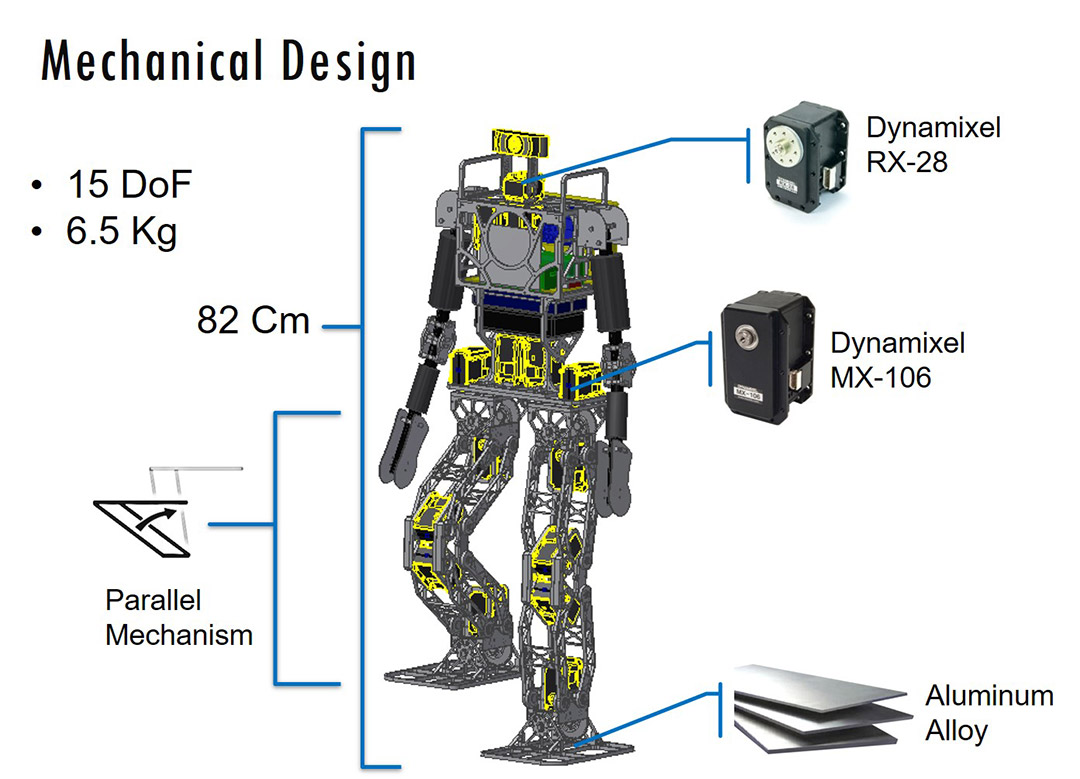
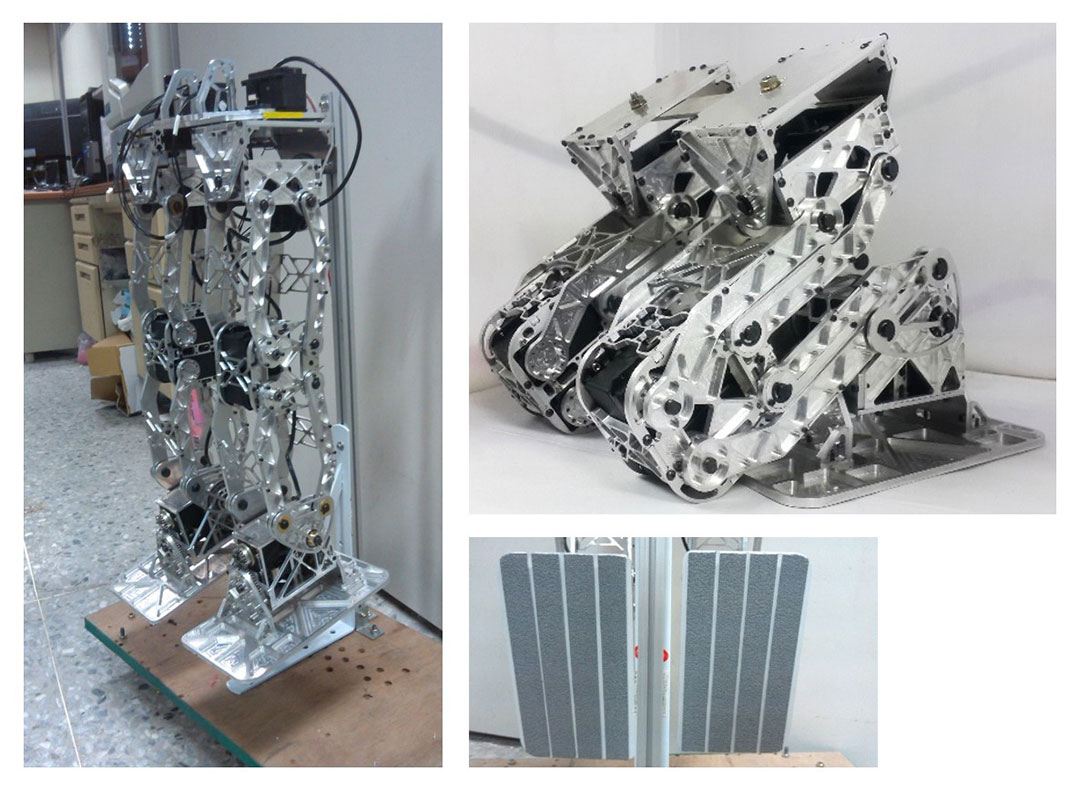
Mechanical parts of HuroEvolutionTN
As a member of the team that developed HuroEvolutionTN, I was heavily involved in the mechanical design of this impressive robot. With a height of just 82mm and a weight of 6.5kg, we had to carefully consider the materials and design elements used in the construction of the robot. We configured the robot with 15 degrees of freedom, and each leg was designed as a parallel mechanism structure to maintain parallel postures between the hip and foot planes. In addition, we included springs in each leg to help reduce the load of the actuators and also maintain the stable posture of the robot even though the power is off.
The main material for the whole body was an aluminum sheet, which was both lightweight and durable. To maintain stability while walking, we developed a sophisticated locomotion controller that combined a linear inverted pendulum model (LIPM) with proportional derivative (PD) control schemes. This controller allowed the robot to walk in omni-directional manners, while maintaining stability and balance. It was truly an incredible experience to contribute to the development of such an advanced and innovative humanoid robot.