
Project information
- Category: Research
- Funding: UniOGS Infotech
- Project date: 2020-2021
Telepresence Robot Simulation
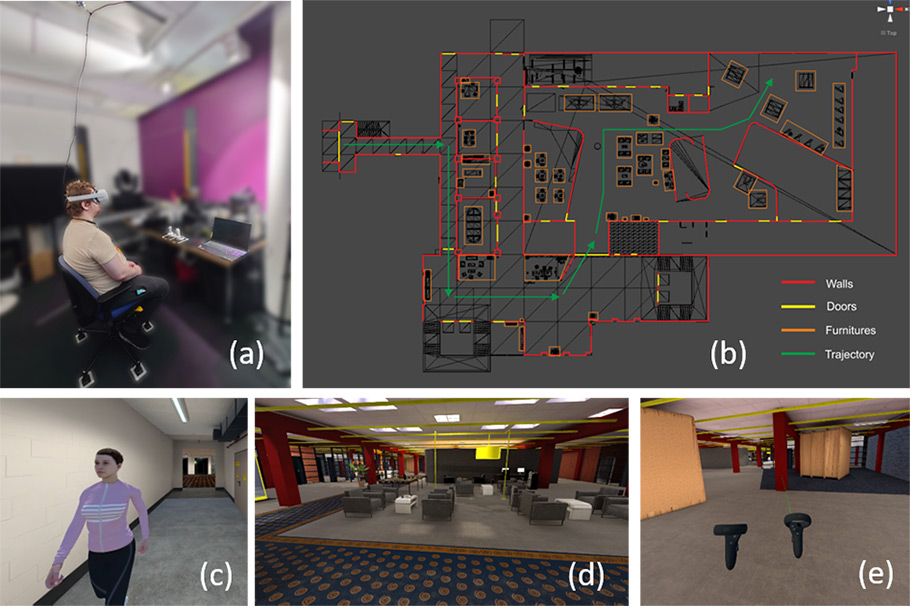
The project aimed to develop an immersive robot telepresence simulation that incorporated the Oulu campus virtual environment.
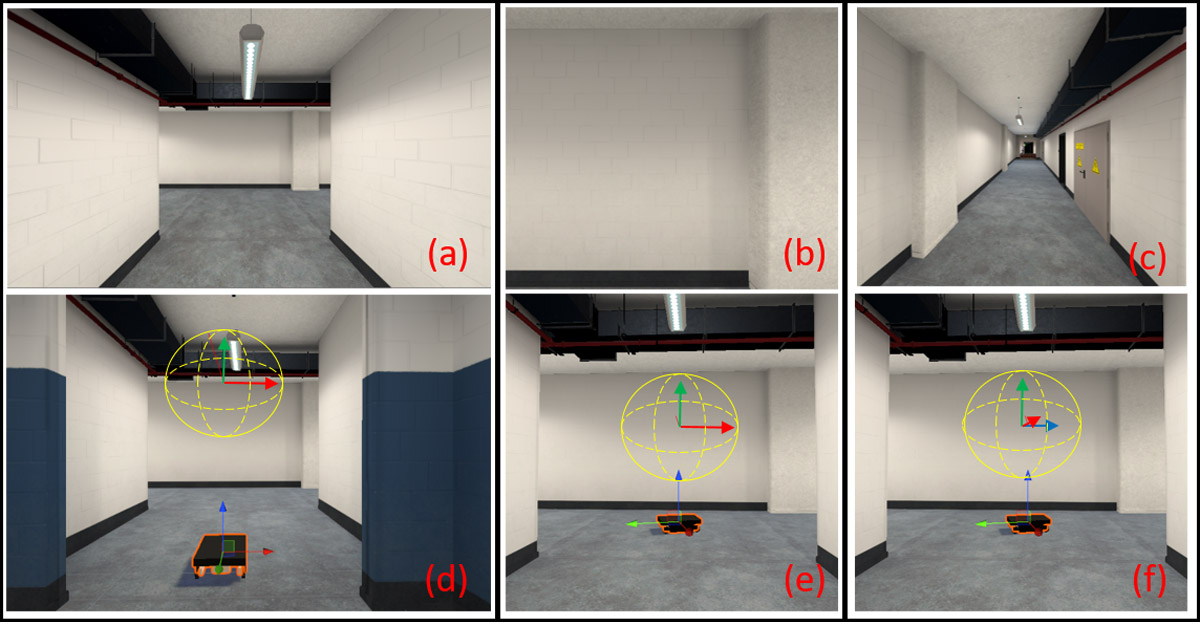
The primary objective of this project was to compare the proposed method, which involved the unwound rotations, with the conventional coupled rotations, while also analyzing users' experiences.
The VR telepresence system was developed using Unity 3D, C#, and ROS2, which was deployed on a Windows & Linux-based server.
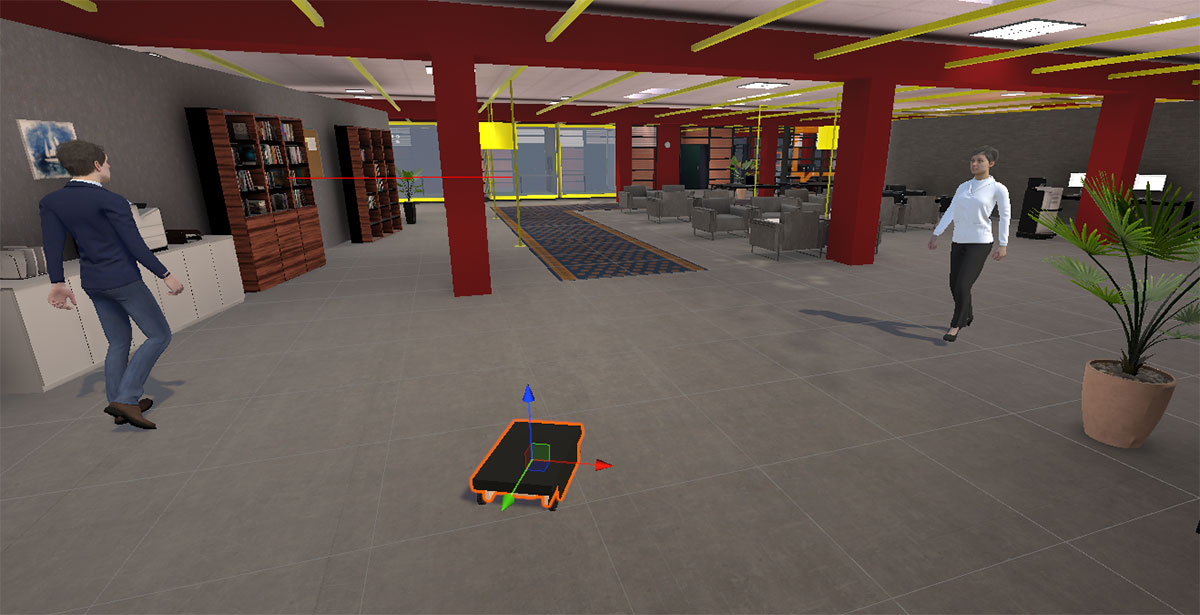
It consisted of a custom-built robot with a 360-degree camera and a VR headset that provided the user with a live/recorded feed of the robot's surroundings.
The robot was controlled using the dynamic window approach (DWB) and A* motion planning algorithm that allowed the robot to move towards the goal while avoiding obstacles and maintaining its speed, acceleration, and distance toward obstacles.
The user experience of the VR telepresence system was designed to be comfortable, intuitive, and immersive.
Users would first put on the VR headset and see a video feed of the robot's surroundings.
Afterward, they were asked to fill out a questionnaire regarding their comfort and experience.
Users reported feeling fully immersed in the remote site and having a strong sense of presence.
The system was designed to minimize motion sickness and provide a seamless user experience.
Overall, the immersive robot telepresence simulation project showcased the potential of the unwound rotations method, which resulted in a more intuitive and comfortable user experience.
The positive feedback received from users highlighted the system's ability to provide an immersive telepresence experience while minimizing motion sickness, making it a promising tool for remote collaboration and communication.