Project information
- Category: Bachelor Thesis
- Funding: DIKTI-PKMP
- Project date: 2012-2013
Multi-agent Robot Mechanical Design
As a skilled engineer in multi-agent robot mechanical design, I have successfully completed several projects that showcase my expertise in designing complex robot systems.
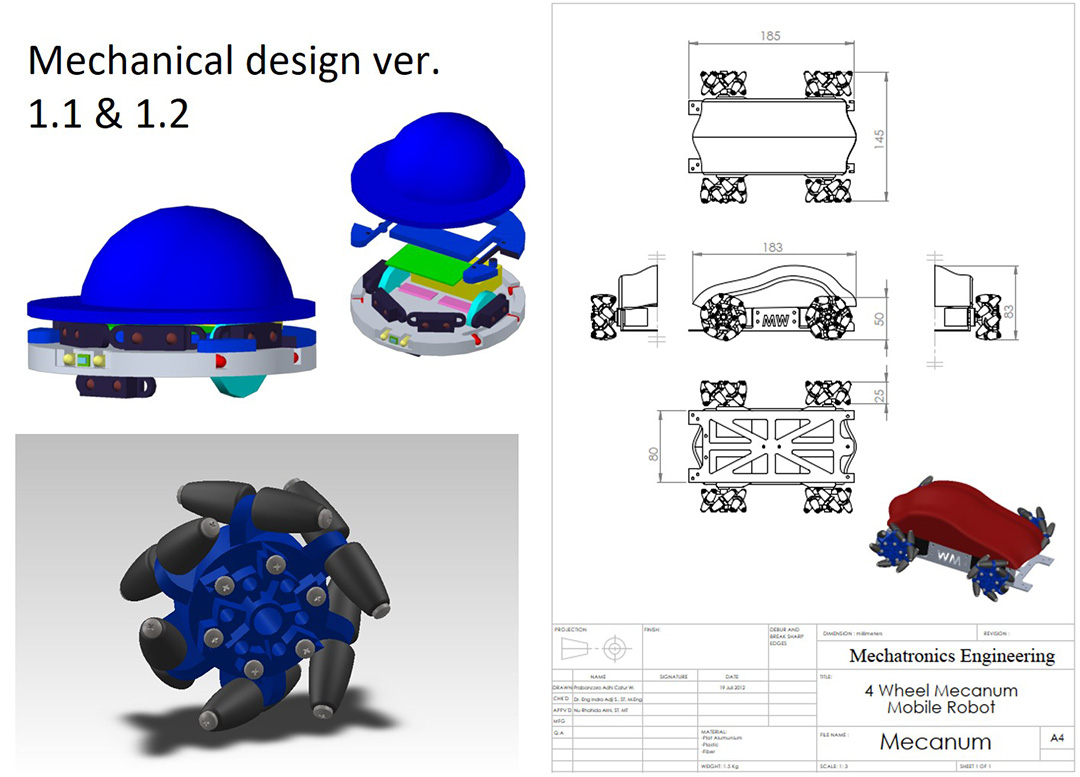
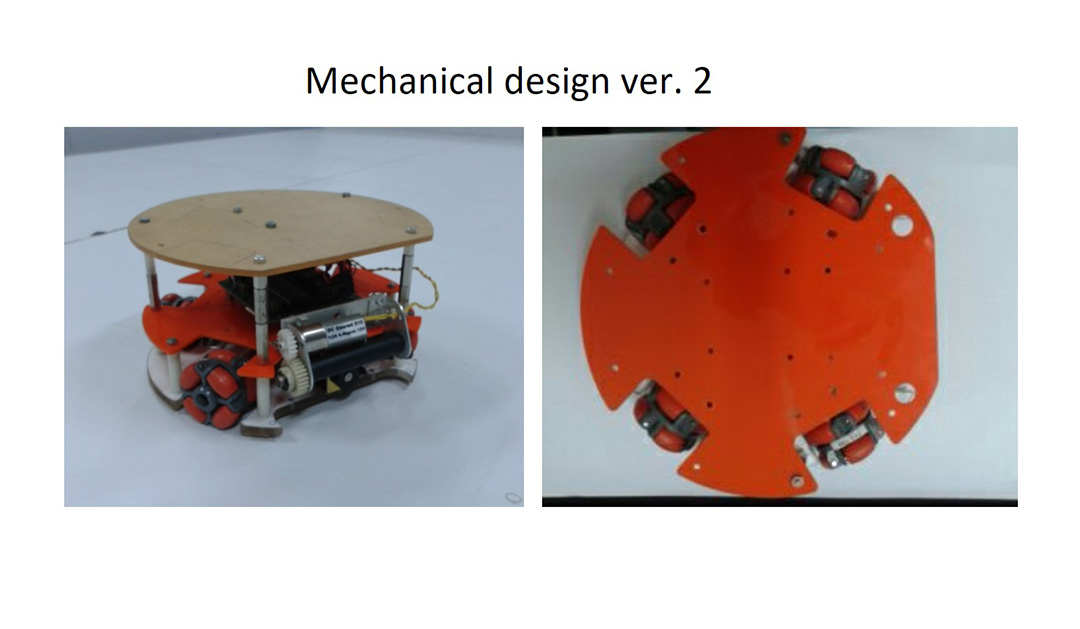
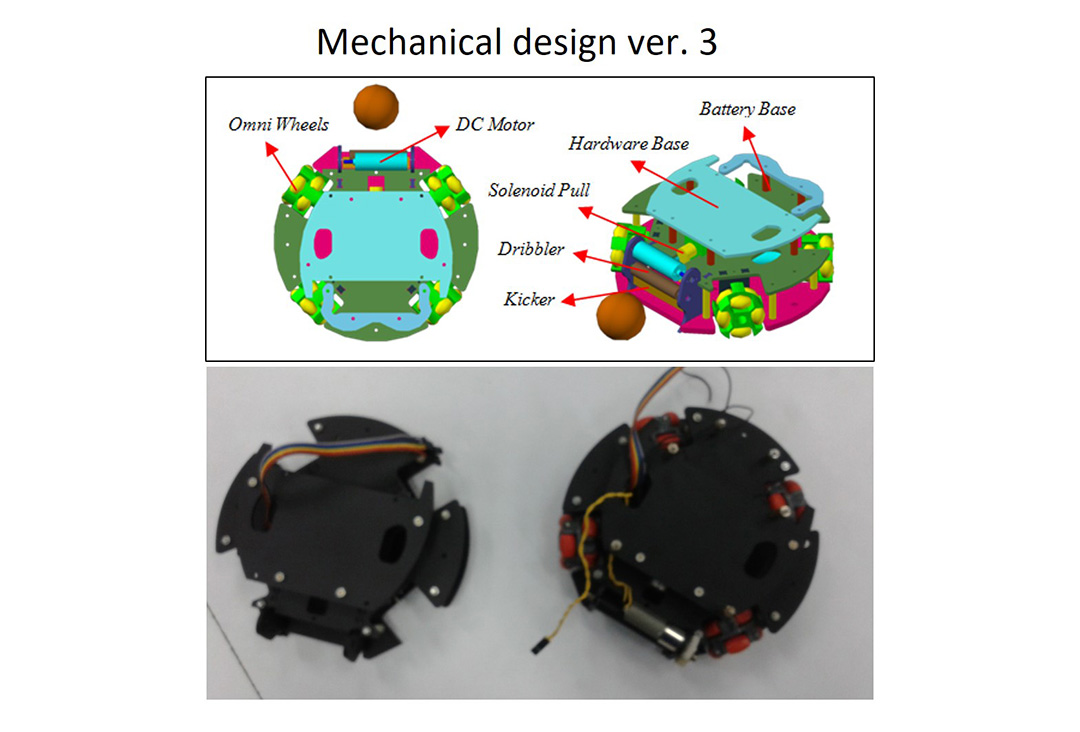
One of my notable achievements includes designing three versions of a robot, each with improved features based on the learning curve of the earlier designs.
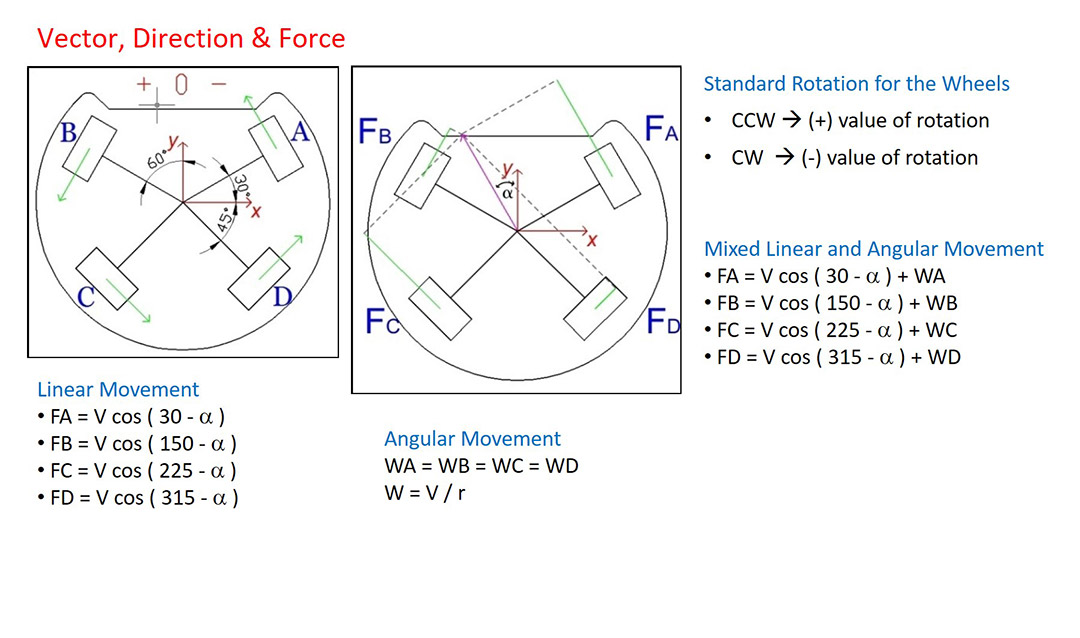
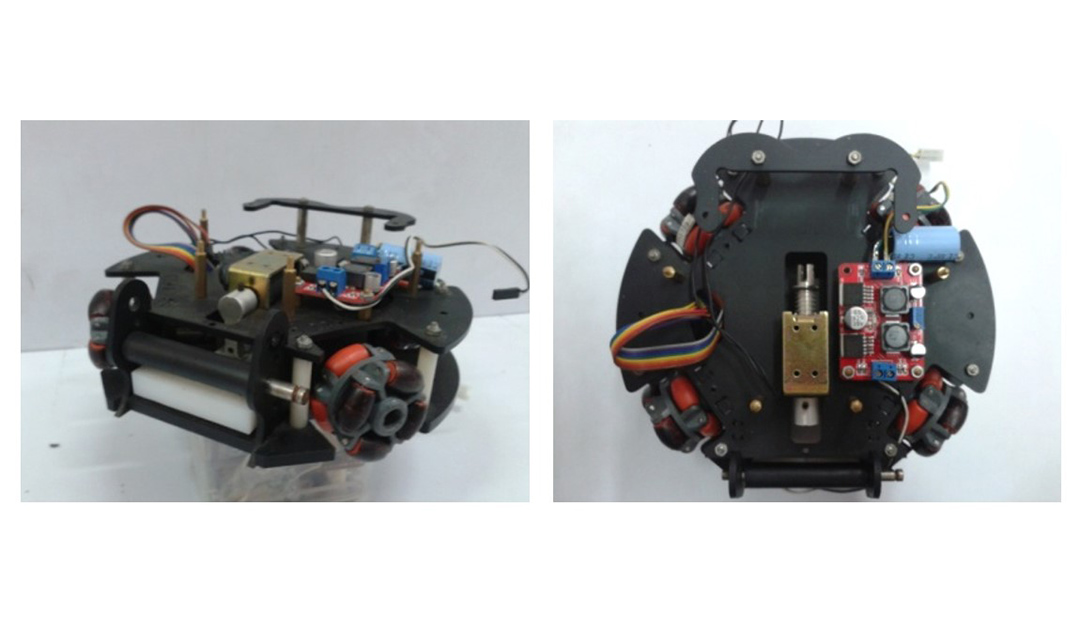
This robot was designed with a holonomic mechanism that required omni wheels for optimum mobility.
Despite the challenge of limited space, I successfully created a compact design
that could accommodate five motors - four wheels, one dribbler - along with solenoid push/pull for ball kicking, an electronics board, and a battery.
To ensure durability and longevity, the robot was constructed using high-quality acrylic and aluminum materials. The front wheels of the robot were designed with a wider angle than the rear wheels, allowing for smoother and more efficient movement on the field. Overall, this project demonstrates my proficiency in mechanical design, particularly in the development of multi-agent robot systems.