Project information
- Category: Course Project
- Project date: 2011-2012
Mobile Robot
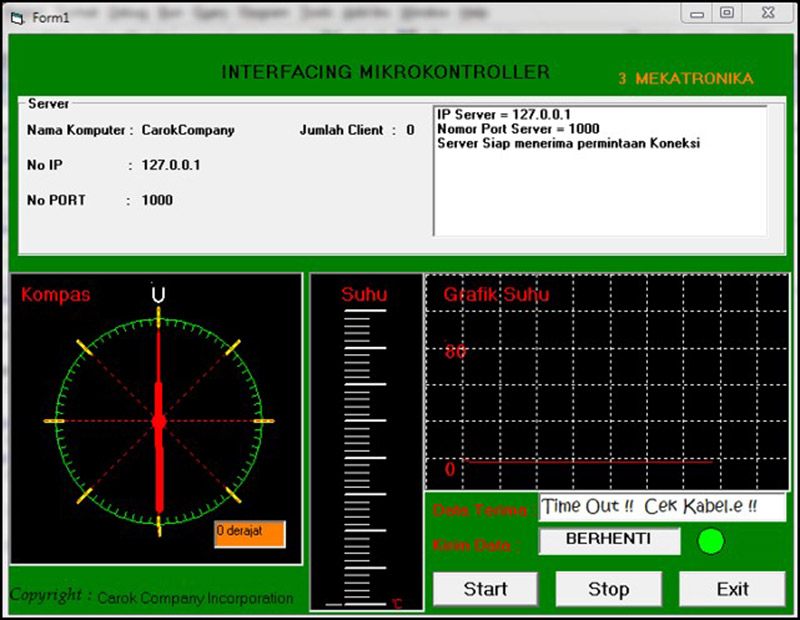
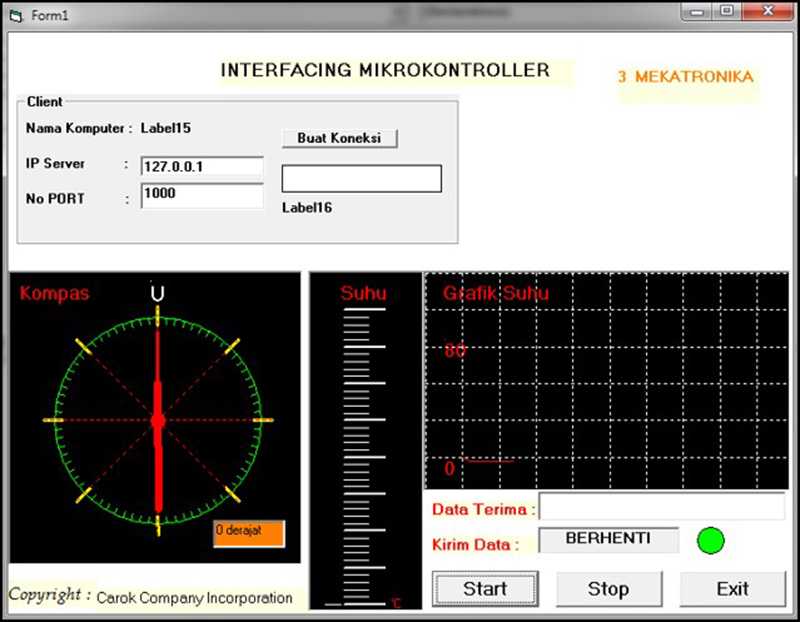
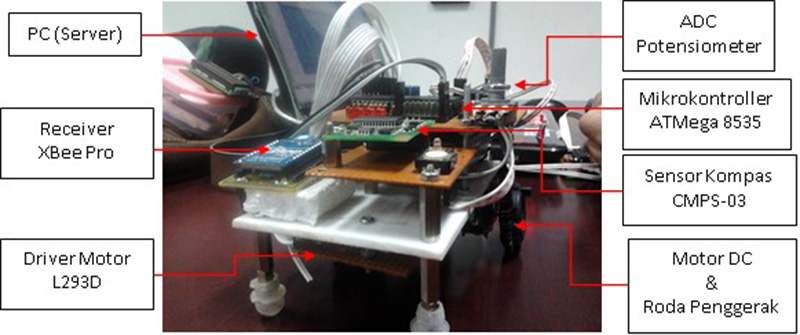
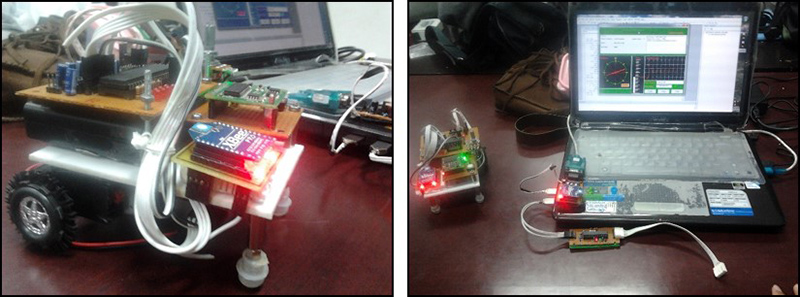
As part of a project to develop a Server-Client Monitoring Service, I designed and implemented a system that utilized Windows Socket with TCP/IP protocol for communication between a server and multiple clients. Additionally, the system allowed the server to communicate with the robot via serial RS232, and all communications were wireless. The robot was controllable by a remote user on either the server or client side, and it transmitted sensory data such as heading angle, acceleration, and temperature. Thanks to the effective implementation of this system, the robot operated smoothly and accurately, earning an A mark on my academic transcript. Overall, this project demonstrated my expertise in systems design and programming, as well as my ability to solve complex engineering problems.