Project information
- Category: Master Thesis
- Funding: MRL-Taiwan Company
- Project date: 2019-2021
IMU-based Wearable Motion Capture Device
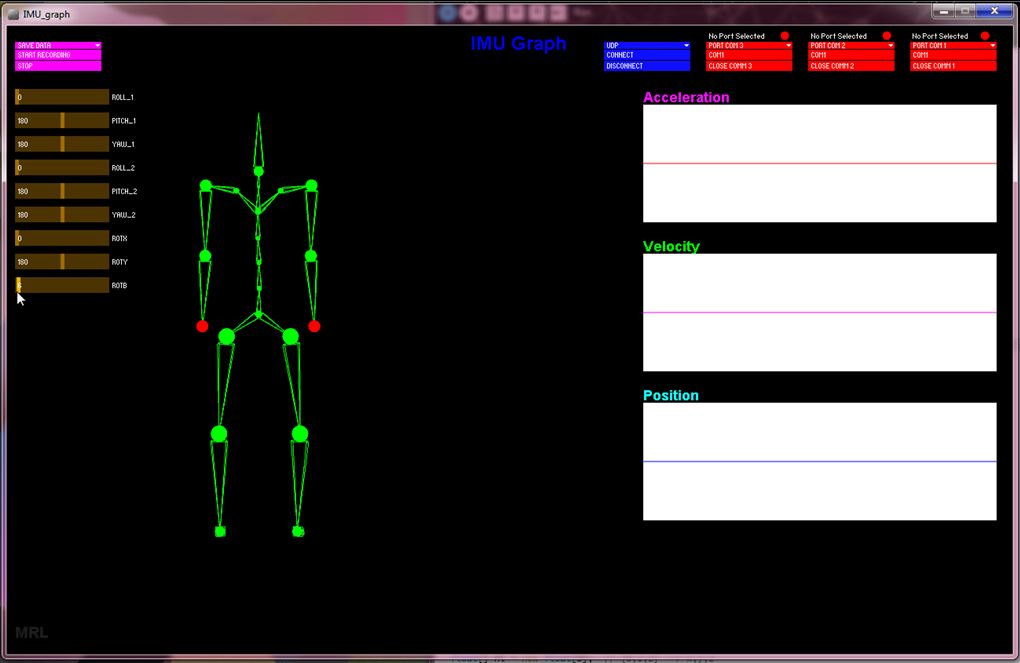
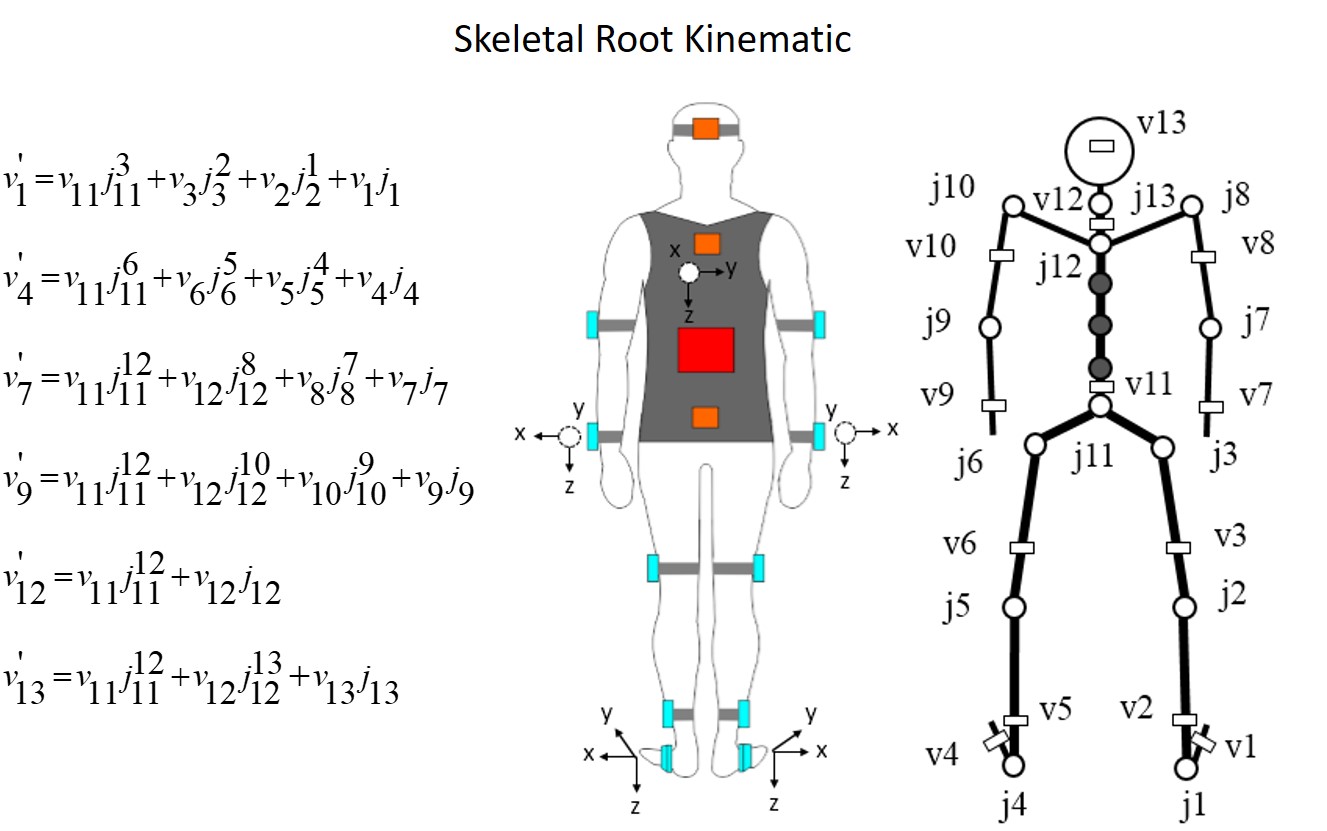
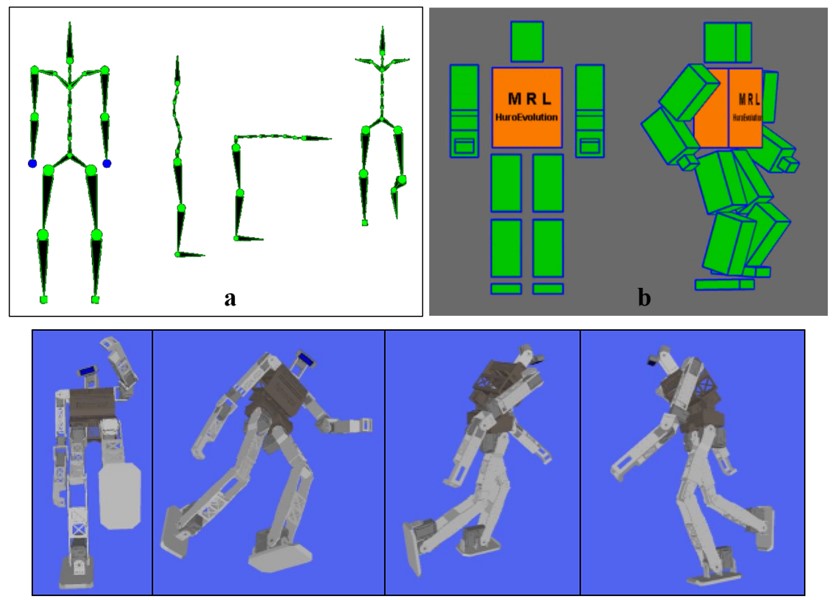
This portfolio project focuses on the development of an IMU-based wearable motion capture device that can accurately track human movement. The device uses a 9-axis inertial measurement unit (IMU) containing an accelerometer, gyroscope, and magnetometer to estimate the orientation of the sensor output. The system is designed to be modular, with multiple IMU modules attached to the human body to reconstruct human attitude estimation.
The system is implemented using a quaternion-based approach and employs several methods to achieve better results,
including a digital motion processor (DMP) for accurate data acquisition, a complementary filter (CF) fused with a gradient descent algorithm, and a Mahony filter combined with a CF.
All approaches work with the DMP system to minimize the accumulative error.
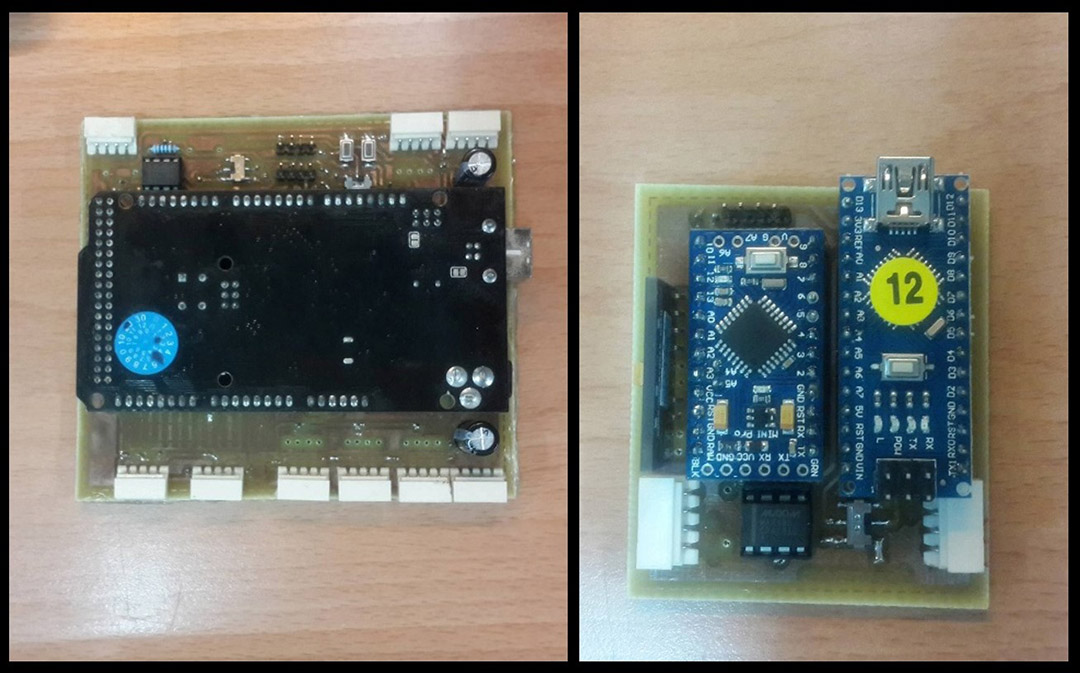
One of the challenges in using a serial communication protocol for an IMU-based wearable motion capture device is latency, which can result in inaccuracies in the tracking data.
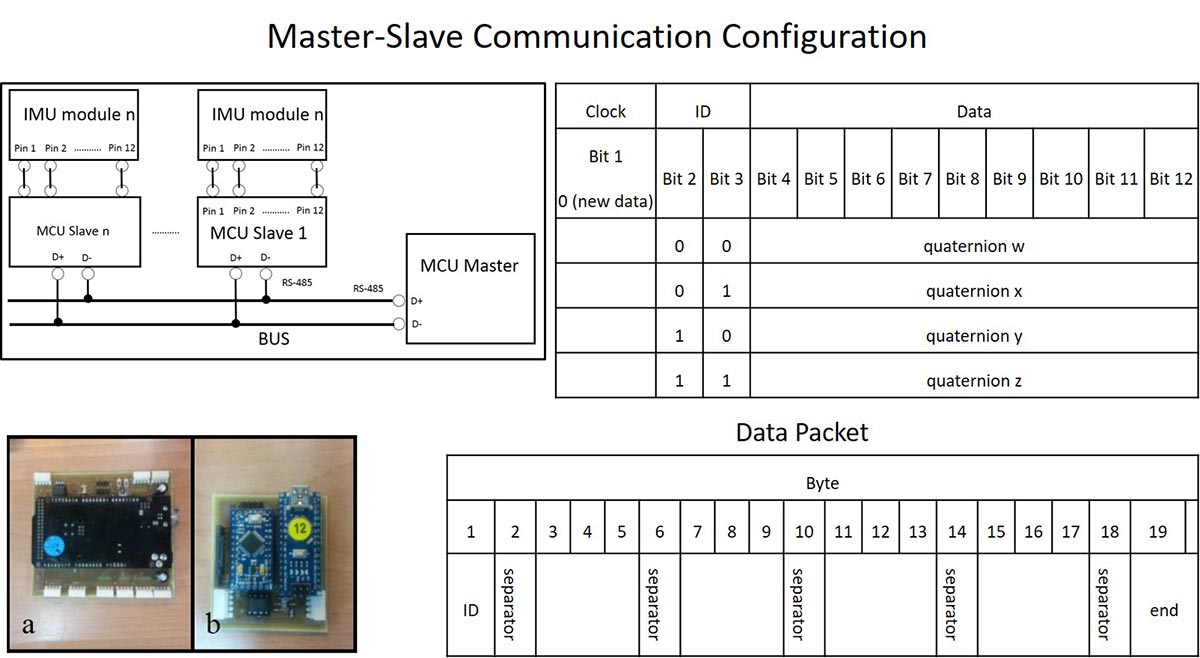
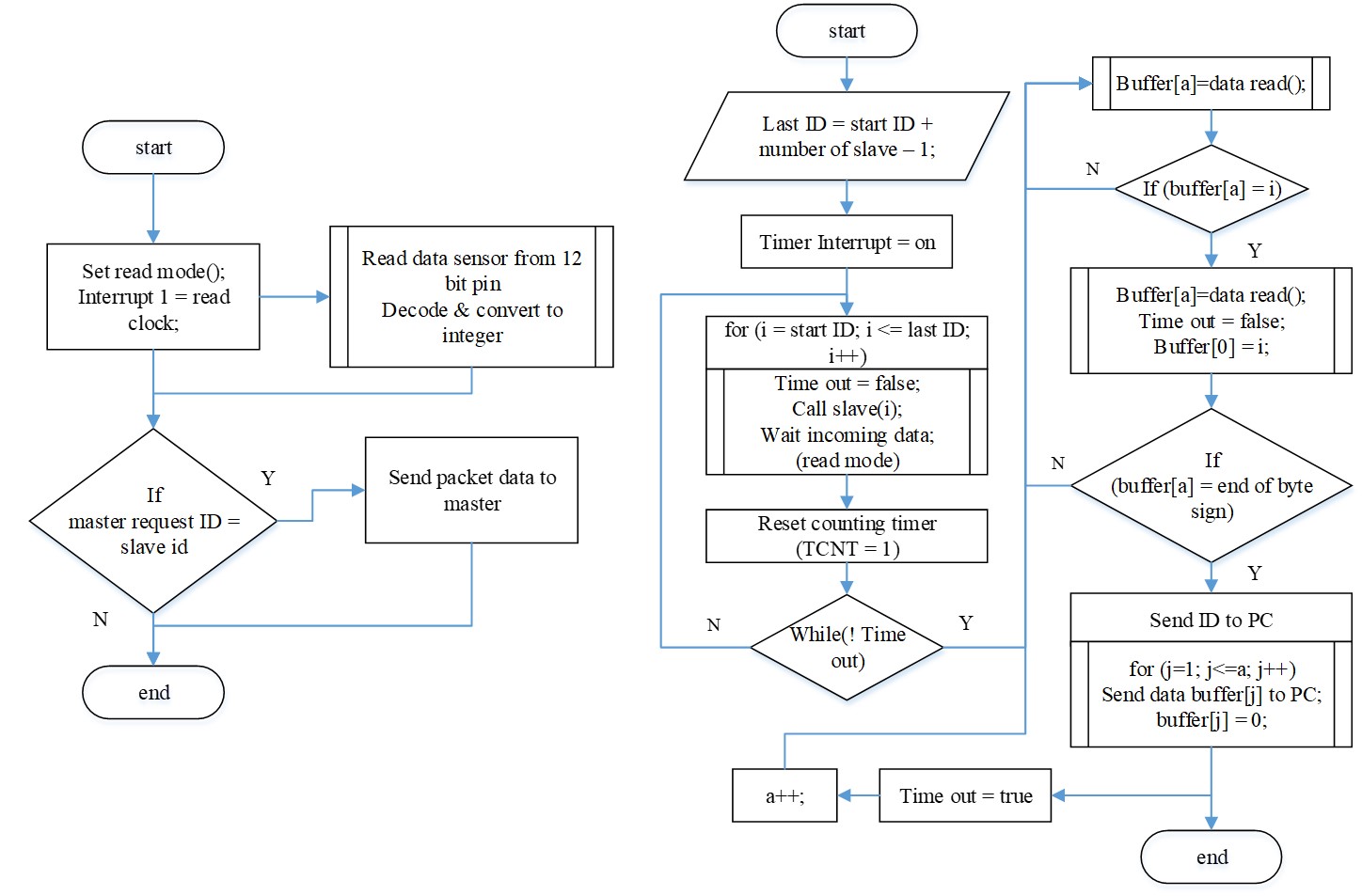
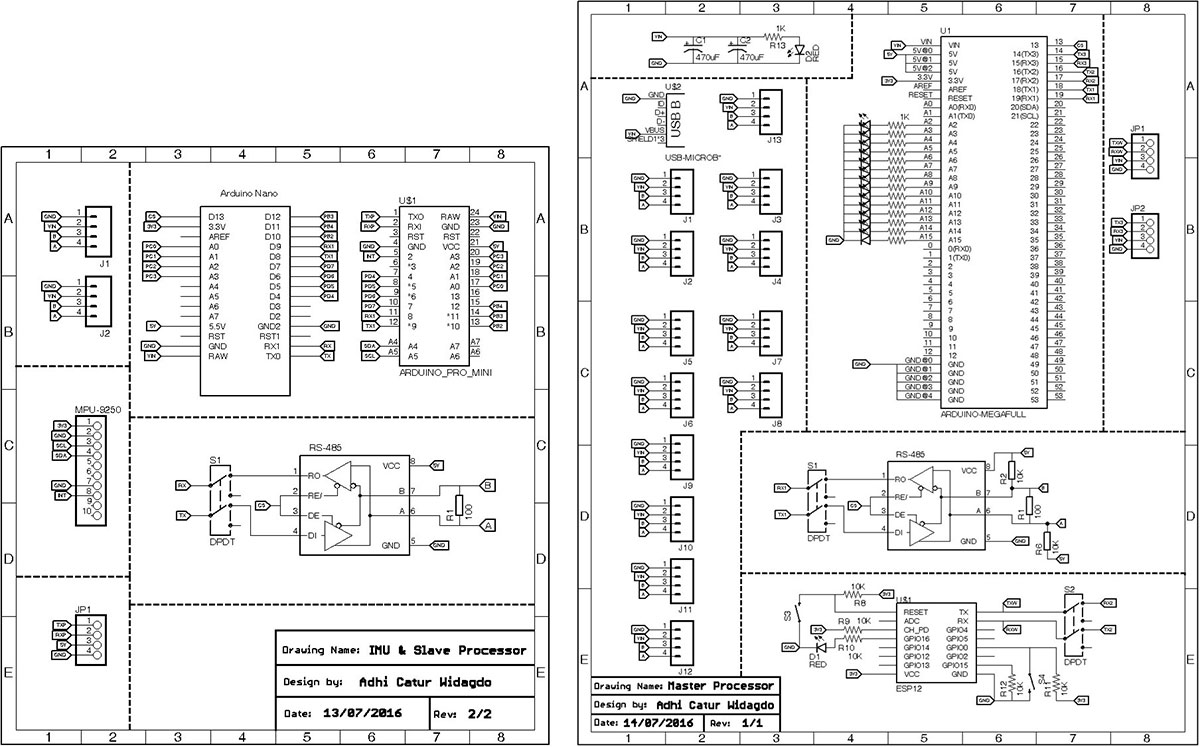
To address this challenge, the proposed solution involves using a method of parallel communication using a 12-bit pin and a master-slave processor for each IMU module.
By using parallel communication, data can be transmitted more quickly and with less latency, resulting in more accurate tracking data.
Additionally, the connection to the main server will be conducted using serial RS485 communication, which further reduces latency and improves the frequency of data transmission.
Overall, this solution is designed to address the challenges associated with serial communication in order to improve the accuracy and reliability of the motion capture device.
In summary, the project demonstrates the effectiveness of using an IMU-based wearable motion capture device for accurately tracking human movement, which has a wide range of applications in fields such as sports, medical treatment, and entertainment.