Project information
- Category: Research
- Funding: DIPA
- Project date: 2011-2012
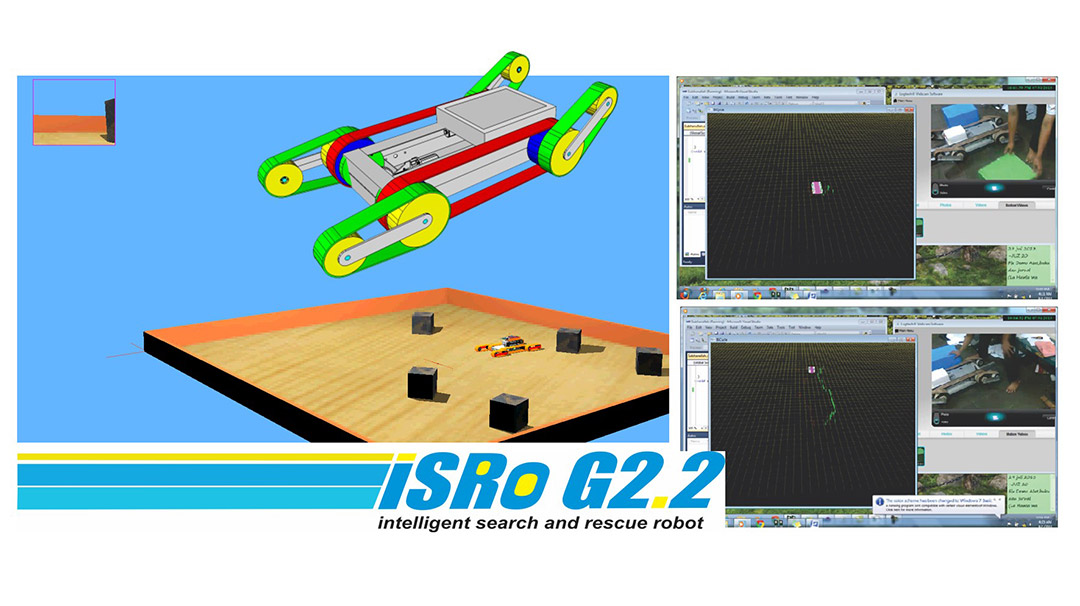
Intelligent Search & Rescue Robot
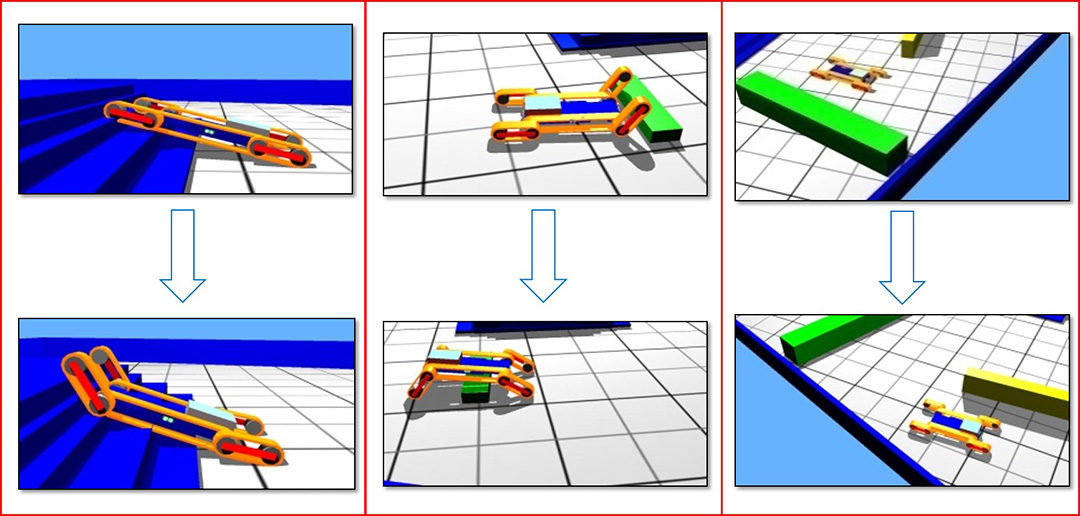
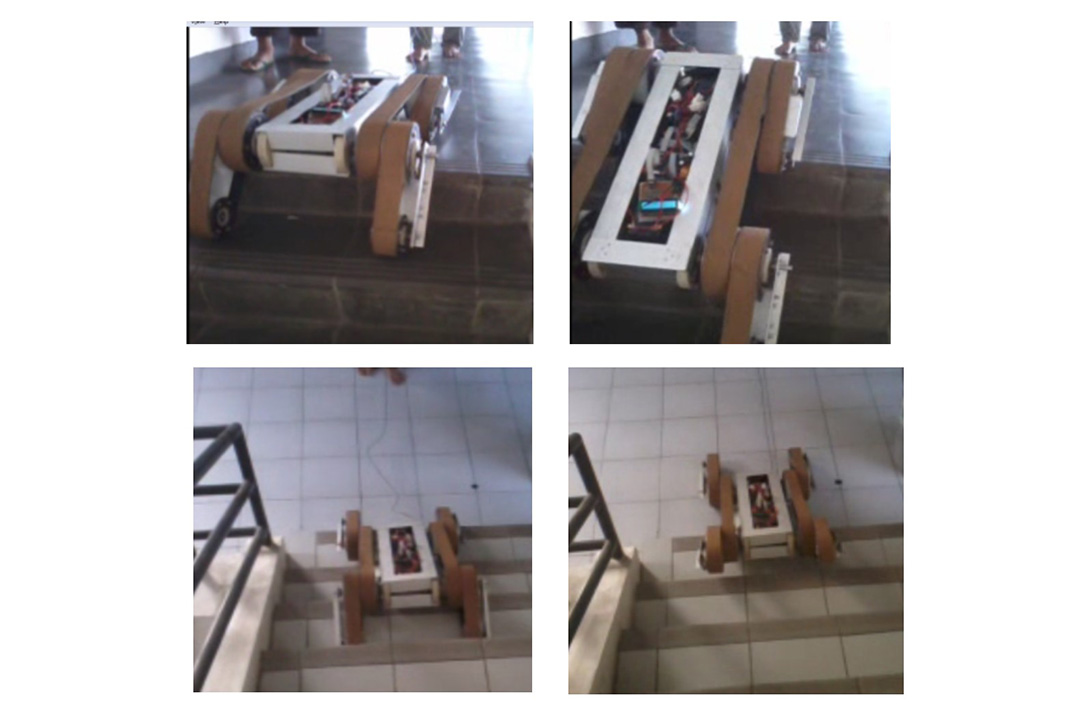
As a robotics enthusiast, I had the opportunity to work on an exciting project focused on the development of an Intelligent Search and Rescue Robot. The main goal of this project was to create a robot that could tackle challenging terrains and obstacles commonly encountered in search and rescue missions. One of the standout features of this robot is its ability to perform independent leg movements, which is particularly useful for navigating staircases and uneven terrain.
Additionally, the robot is equipped with SLAM technology, enabling it to map covered areas accurately and avoid obstacles with the help of a fuzzy logic algorithm. The robot's performance during the simulation process was promising, but it was the real-world tests that truly demonstrated its capabilities. With acceptable performances demonstrated by the real robot, this project was a valuable learning experience that taught me a great deal about robotics and problem-solving.